Линейный лазер: PM 2-L Линейный лазерный нивелир — Линейные и точечные лазеры
PM 2-L Линейный лазерный нивелир — Линейные и точечные лазеры
PM 2-L Линейный лазерный нивелир — Линейные и точечные лазеры — Hilti Россия Skip to main content HiltiНаведите курсор на картинку для увеличения.
Кликните на картинку для увеличения.
Наведите курсор на картинку для увеличения.
Кликните на картинку для увеличения.
Наведите курсор на картинку для увеличения.Кликните на картинку для увеличения.
Наведите курсор на картинку для увеличения.
Кликните на картинку для увеличения.
Артикул #r40928
Линейный лазерный уровень с 2 линиями для горизонтального и вертикального выравнивания, а также построения прямых углов с использованием красного луча
Отзывы
Преимущества и применения
Преимущества и применения
Преимущества- Компактный размер обеспечивает высокую скорость разметки
- Прорезиненный корпус и блокировка маятника для большей прочности
- Предупреждения об отклонении от уровня и низком заряде батареи предотвращают ошибки и незапланированные простои
- Лазер класса 2 – нет необходимости использовать специальные меры безопасности
Применения
- Перенос высотных меток
- Горизонтальное выравнивание подвесных потолков
- Горизонтальное выравнивание электрических розеток, кабельных лотков, радиаторов и систем трубопроводов
- Горизонтальное и вертикальное выравнивание дверей и окон
- Вертикальное выравнивание труб
Для информации о технических свидетельствах и сертификатах, нажмите на соответствующий артикул.
Услуги
- Решение всех вопросов по одному клику или звонку
- Бесплатное обслуживание до 2-х лет, включая замену изношенных деталей, приёмку инструмента в сервис и его доставку
- 3 месяца «Никаких затрат» после полноценного платного ремонта.
- Гарантия качества деталей и отсутствия производственного брака в течение всего срока службы инструмента
- Отдельная маркировка и возможность отслеживания в режиме онлайн обеспечивают прозрачность контроля всего ассортимента инструментов.

- Ежемесячный платеж за использование покрывает все расходы, связанные с эксплуатацией, обслуживанием и ремонтом инструментов, что помогает обеспечить полный контроль расходов.
- Высокоэффективные инструменты и последние технологические разработки помогают повысить производительность на рабочей площадке.
- Подменный инструмент на время ремонта для уменьшения простоев.
- Краткосрочная аренда инструмента на время пиковых нагрузок или для выполнения специальных задач помогает сократить финансовые расходы.
Техническая информация
Документы и видео
Консультация и поддержка
Оценки и отзывы
Регистрация позволяет получить доступ к ценам с учетом персональной скидки.
Не получается войти или забыли пароль?
Пожалуйста, введите свой e-mail адрес ниже. Вы получите письмо с инструкцией по созданию нового пароля.
Нужна помощь? Контакты Войдите, чтобы продолжитьЗарегистрироваться
Регистрация позволяет получить доступ к ценам с учетом персональной скидки.
Выберите следующий шаг, чтобы продолжить
Ошибка входа
К сожалению, вы не можете войти в систему.
Email адрес, который вы используете, не зарегистрирован на {0}, но он был зарегистрирован на другом сайте Hilti.
Количество обновлено
Обратите внимание: количество автоматически округлено в соответствии с кратностью упаковки.
Обратите внимание: количество автоматически округлено до в соответствии с кратностью упаковки.
Впервые на Hilti.ru? Зарегистрируйтесь, чтобы увидеть цены со скидкой. Перейти
PM 40-MG Мультилинейный лазерный нивелир — Линейные и точечные лазеры
PM 40-MG Мультилинейный лазерный нивелир — Линейные и точечные лазеры — Hilti Россия Skip to main content HiltiНаведите курсор на картинку для увеличения.
Кликните на картинку для увеличения.
PM 40-MG: выравнивание гипсокартонных направляющих мультилинейным нивелиром Hilti Рекламный видеоролик лазера PM 40-MG (рус. яз., 16:9)
яз., 16:9)Наведите курсор на картинку для увеличения.
Кликните на картинку для увеличения.
Наведите курсор на картинку для увеличения.
Кликните на картинку для увеличения.
Наведите курсор на картинку для увеличения.
Кликните на картинку для увеличения.
Наведите курсор на картинку для увеличения.
Кликните на картинку для увеличения.
Кликните на картинку для увеличения.
New productАртикул #r7452506
Мультилинейный лазерный нивелир с 3-мя зелеными линиями для горизонтального и вертикального выравнивания и построения прямых углов
- Точность: ±2 мм при 10 м
- Макс. рабочее расстояние (диаметр): 40 м (линии), 100 м (линии, с приёмником)
- Диапазон самовыравнивания при комнатной температуре: -3. 0/ +3.0° °
 0/ +3.0° °
0/ +3.0° °Отзывы
Клиенты также искали зеленый лазер, мультилинейный лазерный нивелир, лазерный уровень, нивелир с зеленым лучом или лазерный уровень 360
Преимущества и применения
Преимущества и применения
Преимущества
- Самый универсальный мультилинейный лазерный нивелир для точного и быстрого горизонтального выравнивания, разметки и выверки положения на 360°
- Аккумуляторная литий-ионная батарея B12 обеспечивает возможность разметочных работ в течение полутора дней
- Аксиконическая технология «Metal Blade Axicon» – защитный корпус для точных компонентов для обеспечения точности мультилинейных лазерных нивелиров в течение долгого времени
- Предупреждения об отклонении от уровня и низком заряде батареи предотвращают ошибки и незапланированные простои
- Лазер класса 2 – нет необходимости использовать специальные меры безопасности
Применения
- Выравнивание подвесных потолков
- Установка направляющих для гипсокартона на полах, стенах и потолках
- Перенос высотных меток
- Вертикальное выравнивание труб и кабелей
- Горизонтальное выравнивание электрических розеток, кабельных лотков, радиаторов и систем трубопроводов
Для информации о технических свидетельствах и сертификатах, нажмите на соответствующий артикул.
Услуги
- Решение всех вопросов по одному клику или звонку
- Бесплатное обслуживание до 2-х лет, включая замену изношенных деталей, приёмку инструмента в сервис и его доставку
- 3 месяца «Никаких затрат» после полноценного платного ремонта.
- Гарантия качества деталей и отсутствия производственного брака в течение всего срока службы инструмента
- Отдельная маркировка и возможность отслеживания в режиме онлайн обеспечивают прозрачность контроля всего ассортимента инструментов.
- Ежемесячный платеж за использование покрывает все расходы, связанные с эксплуатацией, обслуживанием и ремонтом инструментов, что помогает обеспечить полный контроль расходов.
- Высокоэффективные инструменты и последние технологические разработки помогают повысить производительность на рабочей площадке.
- Подменный инструмент на время ремонта для уменьшения простоев.
- Краткосрочная аренда инструмента на время пиковых нагрузок или для выполнения специальных задач помогает сократить финансовые расходы.

Техническая информация
Документы и видео
Консультация и поддержка
Оценки и отзывы
Зарегистрироваться
Регистрация позволяет получить доступ к ценам с учетом персональной скидки.
Не получается войти или забыли пароль?
Пожалуйста, введите свой e-mail адрес ниже. Вы получите письмо с инструкцией по созданию нового пароля.
Нужна помощь? КонтактыВойдите, чтобы продолжить
Зарегистрироваться
Регистрация позволяет получить доступ к ценам с учетом персональной скидки.
Выберите следующий шаг, чтобы продолжить
Ошибка входа
К сожалению, вы не можете войти в систему.
Email адрес, который вы используете, не зарегистрирован на {0}, но он был зарегистрирован на другом сайте Hilti.
Количество обновлено
Обратите внимание: количество автоматически округлено в соответствии с кратностью упаковки.
Обратите внимание: количество автоматически округлено до в соответствии с кратностью упаковки.
Впервые на Hilti.ru? Зарегистрируйтесь, чтобы увидеть цены со скидкой. Перейти
Линейные лазерные нивелиры Измерительная техника
+/- 0,2 мм/м*/** (*для четырех точек пересечения по горизонтали; **не учитывая погрешность, зависящую от условий использования)
+/- 0,3 мм/м*/** (*для четырех точек пересечения по горизонтали; **не учитывая погрешность, зависящую от условий использования)
± 0,3 мм/м* (*не учитывая погрешность, зависящую от условий использования)
± 0,3 мм/м*/** (*для четырех точек пересечения по горизонтали; **не учитывая погрешность, зависящую от условий использования)
± 0,4 мм/м* (*не учитывая погрешность, зависящую от условий использования)
± 0,5 мм на 1 м
± 0,5 мм/м* (*не учитывая погрешность, зависящую от условий использования)
Горизонтальные лазерные лучи: ± 0,2 мм/м*; вертикальные лазерные лучи: ± 0,3 мм/м* (*не учитывая погрешность, зависящую от условий использования)
Линейный лазер для напольных покрытий FLS, 90 дальность 15 м STABILA 18574
1. Оплата наличными при доставке нашим курьером или в офисе при получение заказа.
Оплата наличными при доставке нашим курьером или в офисе при получение заказа.
Заказ оплачивается наличными при получении вашего заказа в офисе или при доставке нашим курьером.
Вместе с заказом выдается кассовый чек , комплект отгрузочных документов, подарок от суммы заказа и сам заказ.
2. Оплата с помощью сервиса Яндекс Касса.
Заказ можно оплатить с помощью сервиса Яндекc Касса.
Варианты оплаты заказа
1. Банковские карты онлайн-оплата : Visa, Mastercard, Maestro, Мир.
2. Электронные деньги оплата из электронного кошельков или с привязанных к ним банковских карт таких как : Яндекс.Деньги, QIWI.
3. Интернет-банкинг оплата счета в интернет-банке : Сбербанк Онлайн, Альфа Банк, Промсвязьбанк.
Подробные инструкции как опатить ваш заказ
1. Банковские карты Visa, Mastercard, Maestro, Мир подробная инструкция скачать
Банковские карты Visa, Mastercard, Maestro, Мир подробная инструкция скачать
2. Электронные деньги Яндекс Деньги подробная инструкция скачать
3. Электронные деньги QIWI подробная инструкция скачать
4. Интернет-банкинг Сбербанк Онлайн подробная инструкция скачать
5. Интернет-банкинг Альфа Банк подробная инструкция скачать
6. Интернет-банкинг Промсвязьбанк подробная инструкция скачать
После оплаты заказа одним из выше перечисленных способов вам на почту придет онлайн кассовый чек с указанием наименования заказа и его суммы .
Внимание ! Перед оплатой уточните у наших менеджеров наличие выбранного вами товара !
3. Безналичная оплата или банковский перевод.

Этот способ оплаты доступен при заказе товаров как физическими , так и юридическими лицами, для этого при оформлении заказа нужно выбрать пункт
1. Для юридичесиких лиц Безналичная оплата по выставленному счету ;
2. Для физических лиц Банковский перевод :
Мы отправим вам счет на оплату с печатью на указанную вами при регистрации электронную почту , также с вами свяжиться менеджер для уточнения деталей вашего заказа.
Для физических лиц есть возможность выслать квитанцию с заполненными нашими реквизитами для оплаты заказа в отделениях Сбербанка России.
Данный способ оплаты доступен физическим лицам при выборе получения своего заказа до пункта выдачи со страховкой или курьером до двери со страховкой.
Данный способ оплаты доступен при выборе доставки вашего заказа слежующими курьерскими компаниями :
1. СДЭК
2. Boxberry
3. PickPoint .
При оформление заказа наложенным платежом к общей сумме заказа прибавляется дополнительный процент за данную услугу.
Дополнительную сумму которую вам необходимо нужно доплатить вы сразу увидите, если при оформление заказа выберите во вкладке способ оплаты вариант оплата наличными при получении заказа.
К сумме заказа автоматически прибавляется дополнительная сумма смотрите пример ниже.
Пример оформления
- Выбор варианта способа оплаты наличными в пункте выдачи
- Общая сумма стоимости заказа при выборе способа оплаты наличными в пункте выдачи

После прибытия вашего заказа в выбранный пункт выдачи вам придем смс оповещение о его прибытие.
Вы прибываете в пункт выдачи с паспортом, сообщаете номер заказа оператору, оплачиваете заказ наличными или с помощью банковской карты.
Далее забираете ваш заказ и подарок от суммы заказа.
Оборудование, приборы неразрушающего и разрушающего контроля, геодезические приборы, приборы для энергоаудита, измерительные приборы, лаборатории.
Тип оборудования: Лазерный нивелир
Производитель: KEEPER, Китай
Серия: KEEPER LASER PRO
Модель: KEEPER PRO LASER 3D
Описание: Прибор для построения лазерных плоскостей
Гарантия на линейный лазерный нивелир KEEPER LASER 3D: 24 месяца
Назначение прибора:
Линейный лазерный нивелир KEEPER PRO LASER 3D строит две вертикальные линии, одну горизонтальную линию и точку отвеса. Управление осуществляется мембранной клавиатурой, с помощью которой выбирается режим работы и необходимая комбинация лучей. Лимб поворачивается на 360 градусов, что обеспечивает простое и удобное наведение линий на цель. Предусмотрена функция самовыравнивания для более точных замеров. При достижении угла наклона, превышающего диапазон выравнивания, лучи начинают мигать. При выключении питания компенсатор автоматически блокируется, это защищает его от воздействия вибрации во время транспортировки.
Управление осуществляется мембранной клавиатурой, с помощью которой выбирается режим работы и необходимая комбинация лучей. Лимб поворачивается на 360 градусов, что обеспечивает простое и удобное наведение линий на цель. Предусмотрена функция самовыравнивания для более точных замеров. При достижении угла наклона, превышающего диапазон выравнивания, лучи начинают мигать. При выключении питания компенсатор автоматически блокируется, это защищает его от воздействия вибрации во время транспортировки.
Особенности лазерного нивелира KEEPER PRO LASER 3D:
- 3 видимых лазерных линии + точка отвеса;
- Возможность работы с приемником;
- Прочный компенсатор с магнитным демпфером;
- Фиксатор компенсатора для транспортировки;
- Визуальный сигнал при разгоризонтировании;
- Лимб поворачивается на 360 градусов, что обеспечивают простое и удобное наведение линий на цель.
Технические характеристики лазерного нивелира KEEPER PRO LASER 3D:
|
Лазерный луч |
2 вертикальные линии (2V), 1 горизонтальную (Н), точку отвеса (D). |
|
Лазерные излучатели |
635nm/точка отвеса 650nm |
|
Класс лазерной безопасности |
Класс 3а |
|
Точность |
±2mm / 10 m |
|
Диапазон работы компенсатора |
±3° |
|
Рабочий диапазон |
До 20 м, в зависимости от освещения. |
|
Источник питания |
3 x AA батарейки |
|
Время заряда батареи |
Приблизительно 3 часа |
|
Продолжительность работы |
~8 час, если работают все лазерные излучатели |
|
Резьба под штатив |
5/8″ |
|
Рабочая температура |
-10°С ~ +40°С |
|
Вес |
0,9 кг |
Комплект поставки лазерного нивелира KEEPER PRO LASER 3D:
- Построитель плоскостей;
- Батарейки;
- Красные очки;
- Кейс алюминиевый;
- Руководство по эксплуатации.

*Технические характеристики и комплект поставки могут быть изменены производителем без предварительного уведомления
Дополнительную информацию по лазерным нивелирам можно получить, обратившись к нашим специалистам, по телефонам, указанным в разделе контакты
Доставляем приборы для геодезических работ и строительства по всей России курьерскими службами и транспортными компаниями.
404 — Не найдено — Hilti USA
404 — Не найдено — Hilti USA Перейти к основному содержаниюСтраница, к которой вы пытаетесь получить доступ, не существует
Это может быть потому, что
- Страница удалена.
Если вы использовали закладку, рекомендуем обновить ссылку. - Также возможно, что в ссылке есть опечатка.
Пожалуйста, попробуйте следующие варианты
- Воспользуйтесь функцией поиска, чтобы найти то, что вы искали.
- Используйте нашу основную навигацию для доступа к информации о наших продуктах и услугах.
- Начните просматривать нашу домашнюю страницу.
Зарегистрируйтесь здесь
Выполняйте работу быстрее онлайн.
Воспользуйтесь всеми преимуществами использования веб-сайта Hilti.
Не можете войти в систему или забыли пароль?
Пожалуйста, введите ваш e-mail ниже. Вы получите инструкции по созданию нового пароля.
Нужна помощь? Связаться с намиЗарегистрируйтесь здесь
Выполняйте работу быстрее онлайн.
Воспользуйтесь всеми преимуществами использования веб-сайта Hilti.
Выберите следующий шаг для продолжения
Ошибка входа
К сожалению, мы не можем войти в систему.
Адрес электронной почты, который вы использовали, не зарегистрирован для {0}, но был зарегистрирован для другого веб-сайта Hilti.
Обновление количества
Обратите внимание, объем заказа обновлен.Это связано с упаковкой и минимальным объемом заказа.
Обратите внимание, объем заказа был обновлен до. Это связано с упаковкой и минимальным объемом заказа.
Лазерные приемники | Лазерные линейные детекторы для лазерных нивелиров Tiger Supplies
Когда расстояние или условия освещения больше не позволяют вам видеть лазерный луч, лазерные детекторы предлагают решение для любого общего строительства и наружных применений. С лазерными приемниками вы можете использовать свои лазерные нивелиры в полевых условиях даже средь бела дня, потому что эти устройства разработаны так, чтобы легко улавливать лазер, генерируемый вашим лазерным уровнем. Они имеют прочную конструкцию, предназначены для работы в суровых условиях и обеспечивают высокую точность.
С лазерными приемниками вы можете использовать свои лазерные нивелиры в полевых условиях даже средь бела дня, потому что эти устройства разработаны так, чтобы легко улавливать лазер, генерируемый вашим лазерным уровнем. Они имеют прочную конструкцию, предназначены для работы в суровых условиях и обеспечивают высокую точность.
Подходящие для работы с красными, зелеными или инфракрасными лазерными лучами, лазерные приемники доступны как для линейных, так и для ротационных лазеров, что позволяет вам работать на максимальном расстоянии лазера при любых ограничениях видимости.Лазерные детекторы имеют различные настройки точности, чтобы соответствовать потребностям вашего рабочего места. К ним относятся разное количество каналов отображения и пропускная способность, несколько размеров одно- или сдвоенных светодиодных и ЖК-дисплеев для визуального считывания уровня и положения уклона, функция звука и памяти, чтобы вы могли легко найти последний записанный сигнал, и даже варианты блокировки других лазерные или стробоскопические помехи. Все предлагаемые нами лазерные детекторы водо- и пыленепроницаемы и имеют длительный срок службы батарей.
Все предлагаемые нами лазерные детекторы водо- и пыленепроницаемы и имеют длительный срок службы батарей.
Разработаны для двойной работы, некоторые лазерные приемники оснащены встроенным пультом дистанционного управления для дальнейшего повышения производительности.Это позволяет удаленно контролировать уклон, скорость сканирования и вращения, избегая утомительных поездок к ротационному лазеру.
Для точных и стабильных измерений лазерные приемники также включают различные типы систем крепления. Встроенные магниты надежно прикрепляют лазерный детектор к металлическим поверхностям для использования на больших расстояниях и потолков, в то время как многие из них поставляются с прочным кронштейном, идеально подходящим для установки на нивелир, нивелирных и геодезических стержней.
Tiger Supplies предлагает широкий выбор лазерных детекторов от основных производителей, таких как Agatec, AGL, Bosch, CST / Berger, Johnson Level, Leica Geosystems, Northwest Instrument, Pacific Laser Systems, Seco, Spectra Precision и Topcon. Выбирайте из наших высококачественных лазерных приемников и легко экономьте время и деньги!
Выбирайте из наших высококачественных лазерных приемников и легко экономьте время и деньги!
Имя | Совместимые лазеры | Рабочий диапазон | Уровни точности | Дисплей | Цифровое считывающее устройство | Функция отпечатка пальца | Радиосвязь |
| AdirPro LD-6 | Красная линия | 50 футов. | 4 | Одноместный | |||
| AdirPro LD-8 | Красный поворотный | 2000 футов | 2 | двойной | |||
| AdirPro ЛДГ-8 | Зеленый Поворотный | 100 футов | 2 | двойной | |||
| Agatec RCR500 | Красный поворотный | 492 фут. | 2 | двойной | |||
| Agatec RCR500G | Зеленый Поворотный | 492 фут. | 2 | двойной | |||
| Лазерометр AGL | Красный поворотный | НЕТ | 5 | двойной | Есть | ||
| AGL LS100 | Красный поворотный | НЕТ | 3 | двойной | |||
| Bosch LR1 | Красный поворотный | 500 футов. | 2 | двойной | |||
| Bosch LR1G | Зеленый Поворотный | 500 футов | 2 | двойной | |||
| Bosch LR2 | Красная линия | 165 фут. | 2 | двойной | |||
| Bosch LR6 | Красная линия | 165 футов. | 2 | НЕТ | |||
| Bosch LR8 | Красно-зеленая линия | 330 фут. | 2 | Одноместный | |||
| Geomax ZRB90 | Красный и зеленый поворотный | 985 фут. | 1 | Одноместный | |||
| Geomax ZRP105 | Красный поворотный | 1000 футов. | 3 | двойной | |||
| Geomax ZRD105 | Красный поворотный | 3000 футов | 5 | двойной | Есть | ||
| Джонсон 40-6700 | Красный поворотный | НЕТ | 2 | Одноместный | |||
| Джонсон 40-6705 | Красный поворотный | НЕТ | 2 | Одноместный | |||
| Джонсон 40-6715 | Красный поворотный | НЕТ | 2 | двойной | |||
| Джонсон 40-6763 | Green Rotary & Line | НЕТ | 2 | двойной | |||
| Джонсон 40-6780 | Импульсная линия | 300 футов. | 3 | Одноместный | |||
| Leica Rod Eye 120 | Красный поворотный | 2,950 футов | 3 | двойной | |||
| Leica Rod Eye 120G | Зеленый Поворотный | 2,952 футов | 3 | двойной | Есть | ||
| Leica Rod Eye 140 | Красный поворотный | 4,430 футов. | 3 | двойной | |||
| Leica Rod Eye 160 | Сплав и ротор | 4430 футов | 5 | двойной | Есть | ||
| Leica Rod Eye 180-A | Красный поворотный | 4430 футов | 5 | двойной | Есть | Есть | |
| Leica R250 Roteo | Красный поворотный | 500 футов. | 2 | двойной | |||
| Leica RRC350 | Красный поворотный | 100 футов | 2 | двойной | |||
| Leica RRC350G | Зеленый Поворотный | 500 футов | 2 | двойной | |||
| Leica RGR200 | Линия и точка | 262 фут. | 2 | двойной | |||
| Leica RVL80 | Линия | 260 фут. | 1 | НЕТ | |||
| Leica XCR Catch | Многополюсный | НЕТ | 3 | двойной | |||
| Leica CLC Combo | Красный поворотный | 4,400 футов. | 4 | двойной | Есть | Есть | |
| Nedo Acceptor2 | Красный поворотный | 1800 футов | 2 | двойной | |||
| NWI NLD5G | Красный и инфракрасный поворотный механизм | НЕТ | 2 | двойной | |||
| PLS SLD | Линия и точка | 200 футов. | 2 | двойной | Есть | ||
| PLS SLD Зеленый | Зеленая линия и точка | 200 футов | 1 | Одноместный | Есть | ||
| PLS XLD | Красный и зеленый поворотный | 1000 футов | 3 | Одноместный | Есть | ||
| Pro Shot R8 | Красный поворотный | НЕТ | 3 | двойной | |||
| Pro Shot R9 | Красный ротор и сорт | НЕТ | 3 | двойной | |||
| Seco Apache Lightning | Красный и инфракрасный поворотный механизм | 1500 футов. | 4 | двойной | |||
| Seco Apache Storm | Красный и инфракрасный поворотный механизм | 1500 футов | 5 | двойной | Есть | ||
| Spectra HL450 | Красный поворотный | 650 футов | 2 | двойной | Есть | ||
| Spectra HL700 | Красный поворотный | 1500 футов. | 5 | двойной | Есть | ||
| Spectra HL750 | Красный поворотный | 1500 футов | 5 | двойной | Есть | Есть | |
| Spectra HL760 | Красный ротор и сорт | 1500 футов | 6 | двойной | Есть | Есть | Есть |
| Spectra HL760U | Красный, зеленый и инфракрасный | 1500 футов. | 6 | двойной | Есть | Есть | Есть |
| Spectra HR150U | Красный, зеленый и инфракрасный | НЕТ | 1 | двойной | |||
| Spectra HR220 | Пересечение линии и точка | НЕТ | 1 | Одноместный | |||
| Spectra HR320 | Красный поворотный | НЕТ | 2 | двойной | |||
| Stabila REC 220 | Красная импульсная линия | 246 футов. | 1 | Одноместный | |||
| Stabila REC 300 | Красный поворотный | НЕТ | 2 | Одноместный | Есть | ||
| Topcon LS-80A | Красный поворотный | 2,230 футов | 2 | двойной | |||
| Topcon LS-80G | Зеленый Поворотный | НЕТ | 2 | двойной | |||
| Topcon LS-80L | Красный поворотный | 2,620 футов. | 2 | двойной | |||
| Topcon LS-100D | Красный ротор и сорт | 2,625 футов | 5 | двойной | Есть |
|


 Более того, это также может быть
настроены в соответствии с особыми потребностями клиента
требования.
Более того, это также может быть
настроены в соответствии с особыми потребностями клиента
требования.Многолинейные лазеры, объяснение в энциклопедии RP Photonics; лазерные переходы, спектральное объединение лучей, приложения
Энциклопедия> буква М> многолинейные лазеры
можно найти в Руководстве покупателя RP Photonics.Среди них:
Найдите более подробную информацию о поставщиках в конце этой статьи энциклопедии или посетите наш
Вас еще нет в списке? Получите свою заявку!
Используя наш рекламный пакет, вы можете разместить свой логотип и далее под описанием продукта.
Определение: лазерные источники, излучающие несколько лазерных лучей
Альтернативный термин: многолинейные лазеры
Более общие термины: двухлинейные лазеры, трехлинейные лазеры, двухволновые лазеры, лазеры
Более конкретные термины: источники RGB
Противоположные термины: лазеры однолинейные
Немецкий: Mehrlinien-Laser
Категория: лазерные устройства и лазерная физика
Как цитировать статью; предложить дополнительную литературу
Автор: Dr. Rüdiger Paschotta
Rüdiger Paschotta
URL: https://www.rp-photonics.com/multi_line_lasers.html
Многолинейные лазеры (или многолинейные лазеры или многоволновые лазеры ) — это лазерные источники, испускающие излучение с несколькими спектральными линиями — обычно все в одном лазерном луче или с выходом одного волокна.
В некоторых случаях излучение происходит на всех этих линиях одновременно со стабильным распределением оптической мощности.
Например, для демонстрации или специального освещения используются источники RGB, излучающие красный, зеленый и синий лазерный свет, которые можно рассматривать как трехлинейные лазеры.В других случаях можно только переключаться между разными линиями, то есть получать только одну лазерную линию за раз.
Другая возможность (например, обычная для ионных лазеров) состоит в том, что можно получить несколько линий одновременно, но не со стабильным распределением мощности.
Здесь многополюсная работа не является привлекательной особенностью как таковая, но может обеспечить самую высокую общую выходную мощность.
Существуют различные приложения, в которых требуются многолинейные выходы того или иного типа, например, в контексте оптической спектроскопии (например,г. CARS), флуоресцентной микроскопии, генерации микроволнового и терагерцового диапазонов (посредством биений или генерации разностной частоты) и средств связи, а также медицинских лазеров.
В контексте волоконно-оптической связи общий термин — мультиплексирование с разделением по длине волны. Здесь для передачи независимых потоков данных используются каналы с разной длиной волны.
В принципе, частотный гребенчатый источник можно также назвать многолинейной лазерной системой, хотя это не является обычным явлением.
Особым и несколько нетипичным случаем является то, что пилотный луч накладывается на основной лазерный луч, например, при лазерной обработке материалов.Такое устройство обычно не называлось бы двухлинейным лазером.
Также есть случаи, когда многолинейный лазер означает лазер с одной лазерной линией, не относящейся к спектру, а с пространственным шаблоном , показывающим несколько линий — обычно получаемым с помощью какого-либо формирователя луча. Такие устройства используются как юстирующие лазеры.
Такие устройства используются как юстирующие лазеры.
Параметры луча
В случаях, когда используются существенно разные длины волн, возникает вопрос, как следует выбирать параметры пучка для оптимального пространственного перекрытия.Обычно предпочитают постоянное соотношение радиусов луча для разных длин волн вдоль луча. Для достижения этого компоненты с разной длиной волны должны иметь фокус луча в одном и том же положении, и все они должны иметь одинаковую длину Рэлея. Это означает, что лучи с более короткой длиной волны имеют меньший радиус луча. Эти условия могут быть выполнены естественным образом, например, когда все излучение генерируется в общем объемном резонаторе лазера.
Один или несколько лазеров
Кооперативная лазерная
В принципе, один лазер может излучать одновременно несколько лазерных линий.Это особенно хорошо работает, когда может быть реализована кооперативная генерация в каскаде лазерных переходов.
Однако редко когда доступна комбинация лазерных переходов с длинами волн, подходящими для конкретного применения.
Несколько лазерных переходов с одного начального уровня
Чаще всего усиливающая среда лазера имеет несколько лазерных переходов, начиная с общего верхнего лазерного уровня. Типичным примером является Nd: YAG, демонстрирующий хорошо известный переход 1064 нм, а также дополнительные переходы на 946, 1123, 1319, 1338, 1415 и 1444 нм.Примером лазера видимого диапазона с несколькими линиями излучения является волоконный лазер, легированный празеодимом, для излучения в красной (635 нм), оранжевой (605 нм), зеленой (520 нм) и синей (491 нм) областях спектра.
Часто бывает относительно просто реализовать переключение между несколькими лазерными линиями, по крайней мере, когда есть существенное спектральное разделение всех линий.
Обычно внутри лазерного резонатора имеется дисперсионный оптический элемент (например, призма) и торцевое зеркало, угловое выравнивание которого может быть изменено.Для одной конкретной настройки этого зеркала только одна спектральная составляющая будет достаточно хорошо выровнена для обеспечения генерации.
С другой стороны, с общим верхним лазерным уровнем часто бывает непросто получить одновременную генерацию на нескольких линиях со стабильным распределением мощности, потому что конкуренция между такими лазерными линиями обычно довольно тонкая.
Лазер обычно предпочитает переход с максимальным чистым усилением, даже если разница в усилении очень мала.В принципе, можно использовать какой-то стабилизирующий механизм, например нелинейный ограничивающий механизм для каждой лазерной линии.
Часто более практичным подходом является использование диспергирующего оптического элемента в лазерном резонаторе, так что положение луча в усиливающей среде в некоторой степени зависит от длины волны.
Таким образом избегается конкуренция между разными линиями; каждая часть усиливающей среды работает только с одной длиной волны.
Тем не менее, большая часть оптического резонатора может быть изготовлена для всех оптических компонентов вместе, так что требуется относительно небольшое количество оптических элементов и автоматически получается точное наложение различных лазерных лучей на выходе. В этом случае относительные колебания наведения луча обычно довольно слабы.
В этом случае относительные колебания наведения луча обычно довольно слабы.
Медиа с многократным усилением
Можно создать твердотельный объемный лазер, например, состоящий из двух или более различных лазерных кристаллов, каждый из которых имеет активное легирование для разных длин волн — и все это в общем лазерном резонаторе с подходящими коэффициентами отражения лазерных зеркал. В качестве альтернативы иногда можно использовать один лазерный кристалл, содержащий несколько примесей.
В идеале все каналы с длиной волны могут обслуживаться одним источником накачки.
Нелинейное преобразование частоты
Некоторые многоволновые лазерные источники используют некоторый вид нелинейного преобразования частоты, например удвоение частоты, и выводят свет с удвоенной частотой вместе с некоторым остаточным светом лазера.
Для получения более близко расположенных длин волн можно использовать один или несколько рамановских лазеров.
Используя оптоволоконную технологию, можно реализовать многокаскадные рамановские преобразователи, генерирующие выходные сигналы с несколькими длинами волн.
Объединение спектральных лучей
Другая возможность — реализовать многолинейный лазер путем комбинирования спектрального луча с выходами отдельных лазеров.С оптикой, объединяющей луч, в одном корпусе, устройство можно использовать как одиночный лазер. Однако при этом необходимо обеспечить точную и стабильную фокусировку и выравнивание различных лучей. Степень критичности таких требований зависит от приложения. Они не могут быть критическими, например если компоненты с разной длиной волны в любом случае пространственно разделены для приложения.
Двухволновые лазерные диоды
Двухволновые лазерные диоды также могут быть изготовлены и имеются в продаже.Однако некоторые из них имеют два разных лазерных диода с разными длинами волн, реализованные в непосредственной близости на одном полупроводниковом кристалле.
Следовательно, их излучение не будет полностью перекрываться в пространстве.
Такие устройства используются для чтения цифровых данных с различных типов оптических носителей, таких как CD-ROM, DVD и диски blue-ray.
В других случаях используется один резонатор лазера, имеющий разные (отдельно накачиваемые) секции для разных длин волн [4].
Лазерные диоды + волоконный усилитель
Существуют также многолинейные лазерные источники на основе нескольких затравочных лазерных диодов с разными длинами волн и волоконного усилителя для увеличения выходной мощности.Такой подход обеспечивает высокую мощность с идеальным пространственным перекрытием. Кроме того, это дает высокую гибкость в отношении распределения мощности по каналам с разной длиной волны, настройки длины волны, общей или раздельной модуляции мощности для разных каналов и т. Д. Однако этот подход ограничен случаями, когда все задействованные длины волн находятся в пределах полосы усиления определенного активного волокна.
Вопросы и комментарии пользователей
Здесь вы можете оставлять вопросы и комментарии.Если они будут приняты автором, они будут отображаться над этим абзацем вместе с ответом автора. Автор принимает решение о приеме на основании определенных критериев. По сути, вопрос должен представлять достаточно широкий интерес.
Автор принимает решение о приеме на основании определенных критериев. По сути, вопрос должен представлять достаточно широкий интерес.
Пожалуйста, не вводите здесь личные данные; в противном случае мы бы скоро удалили его. (См. Также нашу декларацию о конфиденциальности.) Если вы хотите получить личный отзыв или консультацию от автора, пожалуйста, свяжитесь с ним, например по электронной почте.
Отправляя информацию, вы даете согласие на возможную публикацию ваших материалов на нашем веб-сайте в соответствии с нашими правилами.(Если вы позже откажетесь от своего согласия, мы удалим эти данные.) Поскольку ваши материалы сначала проверяются автором, они могут быть опубликованы с некоторой задержкой.
Библиография
| [1] | Б. М. Уолш, «Лазеры с двумя длинами волн», Laser Physics 20 (3), 622 (2010), DOI: 10,1134 / S1054660X1005021X |
| [2] | Q. Deng et al. , «DFB-лазер на основе InGaAsP / InP с двумя решетками, интегрированный с SOA для генерации ТГц излучения», IEEE Photon. Technol. Lett. 28 (21), 2307 (2016), DOI: 10.1109 / LPT.2016.25 Technol. Lett. 28 (21), 2307 (2016), DOI: 10.1109 / LPT.2016.25 |
| [3] | C. Diboune et al. , “Многолинейная волоконная лазерная система для интерферометрии атомов цезия и рубидия”, Опт. Express 25 (15), 16898 (2017), DOI: 10.1364 / OE.25.016898 |
| [4] | Y. Liu et al. , «Двухволновый DBR-лазер, интегрированный с высокоскоростным EAM для связи в ТГц диапазоне», Опт. Экспресс 28 (7), 10542 (2020), DOI: 10.1364 / OE.386014 |
| [5] | Y.-ЧАС. Cha et al. , «Двухволновый лазер с зеленым импульсом мощностью 80 Вт на основе стержневого волоконного усилителя, легированного Yb», Прил. Phys. B 127, 78 (2021), doi: 10.1007 / s00340-021-07628-3 |
(Предлагайте дополнительную литературу!)
См. Также: лазерные линии, источники RGB, мультиплексирование с разделением по длине волны, частотные гребенки
и другие статьи в категории лазерные устройства и лазерная физика
Если вам понравилась эта страница, поделитесь ссылкой со своими друзьями и коллегами, e. Эти кнопки обмена реализованы с учетом конфиденциальности! |
 г. через соцсети:
г. через соцсети:Код для ссылок на других сайтах
Если вы хотите разместить ссылку на эту статью на каком-либо другом ресурсе (например, на своем веб-сайте, в социальных сетях, дискуссионном форуме, Википедии), вы можете получить здесь требуемый код.
HTML-ссылка на эту статью:
Статья о многолинейных лазерах
в
Энциклопедия фотоники RP С изображением для предварительного просмотра (см. Рамку выше):
 alt = "article">
alt = "article"> Для Википедии, например в разделе «== Внешние ссылки ==»:
* [https://www. rp-photonics.com/multi_line_lasers.html
статья «Многолинейные лазеры» в энциклопедии RP Photonics]  rp-photonics.com/multi_line_lasers.html
rp-photonics.com/multi_line_lasers.html Добро пожаловать | Обслуживание принтеров и копиров
Техники, прошедшие подготовку по лазерной линии
С 1989 года Laser Line предоставляет компаниям из списка Fortune 100 правильное решение для вывода документов для малого бизнеса. От принтеров и расходных материалов до обслуживания и поддержки — компании доверяют Laser Line экспертные знания в области продуктов и обслуживание клиентов.
Laser Line использует проверенную систему для более эффективного управления парком принтеров и связанными с этим расходами для наших клиентов.Оценивая передовой опыт, вашу текущую среду, новейшие технологии печати и операции вашего бэк-офиса, мы можем предложить вам комплекс услуг, который снизит ваши расходы на поддержку, расходы на поставку и даже продлит срок службы ваших принтеров. Это гарантирует, что наши обученные и сертифицированные члены команды рекомендуют подходящие решения для повышения производительности труда, всегда гарантируя высочайший стандарт обслуживания клиентов.
На протяжении многих лет мы избавляли ИТ-специалистов от времени и стресса, связанных с ремонтом принтеров.
Сколько стоит ваше время? Когда сервер выходит из строя или ваша система подвергается кибератаке, ваше время может быть бесценным. Тем не менее, вы по-прежнему увязли в призывах к ремонту принтеров.
Больше нет.
Посмотрите наш потрясающий вводный видеоролик с участием нашего любимого ИТ-менеджера, Смарти МакПейджа!
Привлекая Laser Line и позволяя нашим опытным и знающим техническим специалистам принимать звонки на обслуживание принтеров с вашей тарелки, вы не только высвободите время для решения более важных ИТ-проблем, у вас даже может быть время на обед!
Использование Laser Line для ремонта вашего принтера — это все равно что иметь собственного специалиста по принтерам в штате, но не в вашей платежной ведомости.![]()
Но это еще не все!
«Чем мы можем вам помочь?»
Мы доставляем расходные материалы, предлагаем несколько программ управления печатью и, что самое главное, мы работаем на местном уровне!
Базируясь в Джессапе, штат Мэриленд, наш технический персонал ежедневно обслуживает весь Балтимор, Вашингтон, округ Колумбия, и Северную Вирджинию. Чаще всего мы можем помочь вам в течение нескольких часов, а не дней. Когда вы звоните в Laser Line для обслуживания или поставок, мы делаем что-то удивительное в наши дни; мы отвечаем на телефонные звонки! Наши сотрудники — это наша семья, и мы никогда не передадим обслуживание клиентов какой-либо автоматизированной системе реагирования.Когда вы звоните нам, вы говорите с нами.
У нас также есть несколько способов связаться с нами на страницах «Запрос на обслуживание» или «Связаться с нами», поэтому обязательно найдите тот способ связи, который лучше всего подходит для вас.
PageSmart
Наша программа подписи по-прежнему является жемчужиной в короне нашего бизнеса, и нашим клиентам все еще трудно в это поверить после стольких лет.
НЕТ ДОГОВОРА.
Да, вы все правильно прочитали.
Чтобы начать работу с Laser Line, подписывать нечего.Подойдет рукопожатие. Просто дайте нам пятнадцать минут, чтобы показать вам, как мы можем сэкономить ваше время, деньги и избавиться от головной боли.
Осмотритесь, пока вы здесь, и узнайте, что еще мы можем предложить. А еще лучше позвоните нам сегодня, и мы будем рады рассказать вам лично! 410-636-1700 или просто заполните нашу контактную форму.
Примечание: для этого содержимого требуется JavaScript.границ | Адаптивный импульсный лазерный вывод линии для реконструкции местности с помощью датчика динамического зрения
Введение
Планирование движения в мобильных роботах требует знания структуры местности перед и под роботом; возможные препятствия должны быть обнаружены, и их размер должен быть оценен.Роботам с особенными ногами необходимо знать местность, по которой они движутся, чтобы они могли соответствующим образом планировать свои шаги. Для этой задачи можно использовать различные 3D-сканеры, такие как Microsoft Kinect © (Palaniappa et al., 2011) или LIDAR (Yoshitaka et al., 2006; Raibert et al., 2008), но эти датчики и их вычислительные накладные расходы обычно потребляют порядка нескольких ватт мощности, имея частоту дискретизации, ограниченную десятками герц. Системы пассивного зрения частично преодолевают эти ограничения, но они демонстрируют ограниченное пространственное разрешение, поскольку их реконструкция местности ограничена небольшим набором характерных точек (Weiss et al., 2010).
Для этой задачи можно использовать различные 3D-сканеры, такие как Microsoft Kinect © (Palaniappa et al., 2011) или LIDAR (Yoshitaka et al., 2006; Raibert et al., 2008), но эти датчики и их вычислительные накладные расходы обычно потребляют порядка нескольких ватт мощности, имея частоту дискретизации, ограниченную десятками герц. Системы пассивного зрения частично преодолевают эти ограничения, но они демонстрируют ограниченное пространственное разрешение, поскольку их реконструкция местности ограничена небольшим набором характерных точек (Weiss et al., 2010).
Многие недостатки в существующих настройках датчиков (как активных, так и пассивных) возникают из-за того, что исследование визуальных сцен в виде стробоскопической серии (глубинных) кадров приводит к избыточным данным, которые занимают полосу пропускания связи и обработки и ограничивают частоту дискретизации кадром ставка. Если избыточная информация уже подавлена на уровне датчика, и датчик асинхронно сообщает о своих выходных данных, выходные данные можно оценить быстрее и с меньшими вычислительными затратами. В этой статье такой датчик технического зрения, так называемый датчик динамического зрения (DVS; Lichtsteiner et al., 2008), объединен с импульсным линейным лазером, образуя активный датчик для восстановления местности перед системой во время ее перемещения. Эта реконструкция ландшафта основана на серии профилей поверхности на основе импульсов линейного лазера. Предложенный алгоритм позволяет извлекать лазерную полосу из асинхронных событий временного контраста, генерируемых DVS, используя только синхронизацию событий, так что лазер может быть импульсным на произвольных частотах от менее 1 Гц до 500 Гц.Гибкость в выборе частот пульсации позволяет быстро и детально реконструировать поверхность для быстрых движений робота, а также сэкономить мощность лазера для медленных движений.
Датчик динамического зрения (DVS)
DVS, используемый в этой установке, основан на функциональности сетчатки и воспринимает только изменения яркости (Lichtsteiner et al., 2008). Каждый пиксель сообщает об изменении логарифмической освещенности, превышающем заданный порог, путем отправки асинхронного адресного события: если он становится ярче, он генерирует так называемое «событие включения», а если он темнее, он генерирует «событие выключения». Асинхронно сгенерированные адресные события передаются на устройство синхронной обработки с помощью сложного программируемого логического устройства (CPLD), которое также передает время в микросекундах, в которое произошло событие. Каждое событие содержит адрес пикселя по горизонтали и вертикали ( u, v ), его полярность (ВКЛ / ВЫКЛ) и метку времени. После регистрации событие записывается в буфер FIFO, который передается через высокоскоростной интерфейс USB 2.0 на платформу обработки. Вычисления в реальном времени на платформе обработки работают на основе так называемых пакетов событий, которые могут содержать переменное количество событий, но доставляются с минимальной частотой 1 кГц.Такой подход к восприятию визуальной сцены имеет следующие преимущества:
Асинхронно сгенерированные адресные события передаются на устройство синхронной обработки с помощью сложного программируемого логического устройства (CPLD), которое также передает время в микросекундах, в которое произошло событие. Каждое событие содержит адрес пикселя по горизонтали и вертикали ( u, v ), его полярность (ВКЛ / ВЫКЛ) и метку времени. После регистрации событие записывается в буфер FIFO, который передается через высокоскоростной интерфейс USB 2.0 на платформу обработки. Вычисления в реальном времени на платформе обработки работают на основе так называемых пакетов событий, которые могут содержать переменное количество событий, но доставляются с минимальной частотой 1 кГц.Такой подход к восприятию визуальной сцены имеет следующие преимущества:
1. Отсутствие глобального времени экспозиции позволяет каждому пикселю установить свою собственную рабочую точку, что приводит к динамическому диапазону более 120 дБ.
2. Поскольку пиксели реагируют только на изменения яркости, выходной сигнал датчика не является избыточным. Это приводит к снижению нагрузки на процессор и, следовательно, к снижению энергопотребления системы.
Это приводит к снижению нагрузки на процессор и, следовательно, к снижению энергопотребления системы.
3. Асинхронное считывание обеспечивает низкую задержку — всего 15 мкс.Эта задержка позволяет очень быстро замкнуть контуры управления, как показано в Delbruck and Lichtsteiner (2007); Конрад и др. (2009); Ni et al. (2012). На рисунке 1 показана скорость DVS, которая способна разрешать быстрые движения, такие как пробуксовка колеса при 3000 об / мин.
4. Поскольку события имеют временные метки по мере их возникновения (с временным разрешением 1 мкс), выходные данные позволяют детально анализировать динамику сцены или обрабатывать ее выходные данные с использованием временных фильтров.
Рисунок 1.Колесо крутится при 3000 об / мин. (A) Неподвижное изображение. (B) События, сгенерированные за 30 мс: события включения отображаются белым цветом, события выключения — черным. (C) События сгенерированы за 200 мкс.
Далее вывод DVS описывается как набор событий, и каждое событие Ev несет свой адрес u — и v , временную метку и свою полярность как значение +1, если это событие ВКЛ и -1 для событий ВЫКЛ [с обозначениями, адаптированными из Ni et al. (2012)].
Ev (u, v, t) = {+ 1, если Δln (Iu, v)> ΘON − 1, если Δln (Iu, v) <ΘOFF (1), где Δ ln ( I u , v ) обозначает изменение освещенности в пикселе с координатами u, v с момента последнего события. Θ ON и Θ OFF обозначают пороговые значения событий, которые необходимо преодолеть, чтобы инициировать событие. Эти пороги могут быть установлены независимо, что позволяет сбалансировать количество событий ВКЛ и ВЫКЛ.
В дополнение к этим визуально запускаемым событиям, DVS позволяет вводить специальные триггерные события с метками времени в выходной поток, подавая импульс на контакт на задней стороне датчика.Эти события Et нумеруются программно, поэтому они несут номер импульса и временную метку:
Материалы и методы
Настройка оборудования
Как описано в Forest and Salvi (2002), существует несколько вариантов комбинирования линейного лазера и камеры для создания 3D-сканера. Поскольку эта установка сканера предназначена для применения на мобильном роботе, у которого уже есть модель движения для целей навигации, была выбрана установка без зеркал с фиксированной геометрией. Как показано на рисунке 2, лазер с красной линией (Laser Components GmbH LC-LML-635) с длиной волны 635 нм и оптической мощностью около 3 мВт был установлен на фиксированном расстоянии над DVS.(Потребляемая мощность лазера составляла 135 мВт.) Относительный угол плоскости лазера и DVS был фиксированным. Чтобы запустить реконструкцию местности, система перемещается по местности, в то время как на лазер подается импульс с частотой f p . Каждый импульс лазера инициировал регистрацию набора событий для дальнейшего анализа и извлечения лазерных полос. Уровень фоновой освещенности составлял ярко освещенную лабораторию примерно на 500 лк.
Рисунок 2.Настройка ДВС вместе с линейным лазером. (A) Схематический вид установки. (B) Фотография камеры DVS128 с линейным лазером: жесткое крепление лазера обеспечивает постоянное расстояние и угол наклона лазера по отношению к камере. На объектив установлен оптический фильтр.
На объектив установлен оптический фильтр.
Для измерений, описанных в разделе результатов, система была закреплена, а местность для сканирования перемещалась на салазках по рельсам под ней. Это привело к созданию простой модели движения камеры, управляемой скоростью двигателя постоянного тока, который тянул салазки к системе датчиков.Салазки были прикреплены к рельсам, которые фиксировали систему в одном измерении и обеспечивали высокую повторяемость измерений. ДВС оснащался линзой с фокусным расстоянием 10 мм и наводился на местность с расстояния 0,45 м. Лазерный модуль располагался на расстоянии 55 мм от датчика под углом наклона α L 8 ° по отношению к главной оси ДВС. Система наблюдала сцену при угле наклона α C , составляющем 39 °.
Для увеличения отношения сигнал / шум, то есть процента событий, происходящих из импульсной лазерной линии, датчик был оборудован оптическим полосовым фильтром (Edmund Optics NT65-167) с центром на 636 нм. Фильтр имеет полную ширину на половине высоты (FWHM) 10 нм и коэффициент пропускания 85% в полосе пропускания и менее 0,01% в полосе заграждения (оптическая плотность 4,0).
Фильтр имеет полную ширину на половине высоты (FWHM) 10 нм и коэффициент пропускания 85% в полосе пропускания и менее 0,01% в полосе заграждения (оптическая плотность 4,0).
Чтобы маркировать лазерные импульсы в потоке событий, триггер события на задней панели DVS был подключен к функциональному генератору, запускающему лазер.
Калибровка
Для извлечения лазерной полосы, то есть пикселей, события которых происходят от лазерной линии, датчик калибруется на основе подхода, описанного в Siegwart (2011). Модель была упрощена следующими допущениями:
1. Для внутренней модели камеры предполагаются прямоугольные пиксели с ортогональными координатами u, v . Это приводит к следующему преобразованию пиксельных координат в координаты камеры x C , y C , z C :
, где k обозначает инверсию размера пикселя, f l фокусное расстояние в пикселях и u 0 , v 0 координаты центрального пикселя.
2. Для модели внешней камеры предполагалось, что направляющая ограничивает исходную точку камеры x C 0 , y C 0 , z C 0 до планарное перемещение (на t y и t z ) в плоскости, охватываемой осями y и z мировой системы отсчета x R , y R и z R , как показано на рисунке 3.В установке, используемой для измерения, вращательные степени свободы системы были ограничены таким образом, чтобы камера могла вращаться (на α C ) только вокруг своей оси x, что приводит к последующему преобразованию камеры в мир. координаты:
(xRyRzR) = (1 0 00cos (αC + π2) sin (αC + π2) 0 − sin (αC + π2) cos (αC + π2)) (xCyCzC) + (0tytz) (5) Тот факт, что DVS не производит никакого вывода для статических сцен, затрудняет поиск и выравнивание соответствий, и поэтому типичный шаблон шахматной доски не может использоваться для калибровки. В качестве альтернативы лазер подавался на два полосатых блока разной высоты, как показано на рисунке 4. Черные полосы на блоках поглощают достаточно лазерного света, чтобы не вызывать никаких событий в DVS. Эта установка позволяет находить достаточные точки соответствия между координатами реального мира и координатами пикселей для решения набора уравнений калибровки (уравнения 3–5). Эта процедура выполняется вручную в Matlab, но ее нужно проделать только один раз.
В качестве альтернативы лазер подавался на два полосатых блока разной высоты, как показано на рисунке 4. Черные полосы на блоках поглощают достаточно лазерного света, чтобы не вызывать никаких событий в DVS. Эта установка позволяет находить достаточные точки соответствия между координатами реального мира и координатами пикселей для решения набора уравнений калибровки (уравнения 3–5). Эта процедура выполняется вручную в Matlab, но ее нужно проделать только один раз.
Рисунок 3.Системы координат, используемые вдоль направления сканирования . y R , z R — координаты реального мира, y C , z C — координаты камеры. x L — это расстояние плоскости лазерной линии, перпендикулярной n L от начала координат камеры. α C — угол наклона датчика относительно горизонтальной плоскости, а α L — угол наклона лазера относительно камеры.
Рисунок 4. Калибровочная установка . Импульсный лазер освещает два полосатых блока разной высоты. (A) Схематический вид. (B) Схема вывода DVS: лазер поглощается черными полосами, и только белые полосы генерируют события.
Лазерное извлечение полосы
Метод извлечения полосы кратко представлен на рисунке 5. Большинство алгоритмов извлечения лазерных полос выполняют простое вычисление максимума по столбцам, чтобы найти пик в интенсивности света e.г., Робинсон и др. (2003); Оргидан и др. (2006). Соответственно, для DVS простейшим подходом к извлечению лазерной полосы было бы накопление всех событий после лазерного импульса и нахождение максимума активности по столбцам. Этот подход плохо работает из-за фоновой активности: даже при установленном оптическом фильтре контрастные края, которые перемещаются относительно датчика, также вызывают события, которые искажают отношение сигнал / шум. Для более надежного извлечения лазерной полосы можно ввести пространственные ограничения, но это ограничит универсальность подхода (Usamentiaga et al. , 2010). Вместо этого предлагаемый подход использует временную информацию с высоким разрешением на выходе DVS.
, 2010). Вместо этого предлагаемый подход использует временную информацию с высоким разрешением на выходе DVS.
Рис. 5. Схематическое изображение экстракционного фильтра с лазерной полосой . По прибытии каждого лазерного импульса временные гистограммы используются для адаптации функции оценки P, и оценка каждого события рассчитывается и отображается на картах оценок. Карты усредняются, и лазерная полоса извлекается путем выбора максимального оценочного пикселя для каждого столбца, если он превышает пороговое значение , пик .
С помощью событий запуска лазера Et n поток событий можно разделить на набор временных окон W n , каждое из которых содержит набор событий S n , где n обозначает n -е триггерное событие. События ВКЛ и ВЫКЛ вынесены в отдельные наборы (для простоты показаны только формулы для событий ВКЛ):
Wn = {t: t> Etn∧t Время событий изменяется из-за асинхронной связи, а также зависит от настроек смещения датчика и условий освещения. Наши предварительные эксперименты показали, что недостаточно просто накапливать события в фиксированном временном окне после импульса. Вместо этого стабильный алгоритм извлечения лазерной полосы должен адаптивно собирать соответствующие события. Эта адаптация достигается с помощью функции временной оценки P , которая постоянно обновляется, как показано на рисунке 6.
Наши предварительные эксперименты показали, что недостаточно просто накапливать события в фиксированном временном окне после импульса. Вместо этого стабильный алгоритм извлечения лазерной полосы должен адаптивно собирать соответствующие события. Эта адаптация достигается с помощью функции временной оценки P , которая постоянно обновляется, как показано на рисунке 6.
Рис. 6. Функция подсчета очков: примеры гистограмм событий лазерного импульса с частотой 1 кГц на рельефе, использованном для реконструкции . (A) Измеренные гистограммы событий включения и выключения после фронтов включения и выключения лазерного импульса. (B) Результирующие функции подсчета OFF и ON после нормализации и вычитания среднего.
Функция подсчета очков используется следующим образом: Каждое событие получает оценку с = P ( Ev ) в зависимости только от его времени относительно последнего триггера. Из этих s устанавливается карта оценок M n (рисунок 5), где каждый пиксель ( u, v ) M n содержит сумму оценок всех события с адресом ( u, v ) в наборе S n [эти подмножества S n обозначаются как C n ( u6 , v )]. Другими словами, M n — это двухмерная гистограмма оценок событий. Эта карта оценок показывает нам для каждого пикселя, насколько своевременными были события по отношению к событию запуска n , и рассчитывается по уравнениям 8–9:
Другими словами, M n — это двухмерная гистограмма оценок событий. Эта карта оценок показывает нам для каждого пикселя, насколько своевременными были события по отношению к событию запуска n , и рассчитывается по уравнениям 8–9:
Функция оценки P , которая присваивает каждому событию оценку, показывающую, насколько вероятно, что оно было вызвано лазерным импульсом. Et n получена с использованием другого подхода, основанного на гистограммах.Обоснование этого подхода заключается в следующем: все события, вызванные лазерным импульсом, должны быть коррелированы с ним по времени, в то время как шумовые события должны иметь равномерное временное распределение. На гистограмме с отсортированными относительными временами события, вызванные лазерным импульсом, должны образовывать пики. В предложенном алгоритме гистограмма H n состоит из k бинов B n шириной fk . Для стабильности H n — это среднее значение для m лазерных импульсов. H n строится по уравнениям 10–12:
В предложенном алгоритме гистограмма H n состоит из k бинов B n шириной fk . Для стабильности H n — это среднее значение для m лазерных импульсов. H n строится по уравнениям 10–12:
Чтобы получить функцию оценки P , гистограммы H ON n и H OFF n нормируются на общее количество T событий в них. Чтобы штрафовать бункеры, которые имеют счетчик ниже среднего, то есть бункеры, в которых преобладает равномерно распределенный шум, из каждого бина вычитается средний счетчик бинов T / k . Событие может иметь отрицательную оценку.Это тот случай, если более вероятно, что это шум, чем сигнал. T n вычисляется из уравнения 13:
n -я функция оценки P n (проиллюстрирована на рисунке 6B) вычисляется по уравнению 14:
PnON (Ev) = ∑ {BnON: Ev∈BnON} — (TnONk) TnON (14) Для извлечения лазерной полосы последние – карт оценок усредняются, и для каждого столбца определяется максимальная оценка – ( мк, v ) и ее значение –.Если максимальное значение превышает пороговое значение ϑ пик , это считается пикселем с лазерной полосой. Если соседние пиксели также превышают пороговое значение, между ними применяется средневзвешенное значение для определения центра лазерной полосы. Затем положения лазерной полосы преобразуются в координаты реального мира с помощью уравнений 3–5 и, таким образом, отображаются как точки на поверхности.
Затем положения лазерной полосы преобразуются в координаты реального мира с помощью уравнений 3–5 и, таким образом, отображаются как точки на поверхности.
Псевдокод, показанный в алгоритме 1, иллюстрирует, как алгоритм выполняется: только по прибытии нового события запуска лазера гистограммы усредняются, карты оценок усредняются до карты средних оценок и извлекается лазерная полоса.В противном случае для каждого события DVS вычисляется только его вклад в текущую карту оценок с использованием текущей функции оценки. Извлечение лазерной полосы и вычисление функции оценки работают в разных временных масштабах. В то время как длина o скользящего среднего для функции оценки выбрана как можно меньшей, чтобы гарантировать низкую задержку, количество усредняемых гистограмм м выбирается как можно большим, чтобы получить более высокую стабильность и ослабить эффект. переменной фоновой активности.
Алгоритм 1. Псевдокод для извлечения лазерной полосы .
Оптимизация алгоритма
Чтобы снизить потребление памяти и вычислительные затраты этого «основанного на кадре» алгоритма, вычисления функции оценки, накопление свидетельств в карте оценок и поиск столбцов лазерных линий были оптимизированы на основе событий. .
Средняя гистограмма изменяется только в длительном временном масштабе (в зависимости от условий освещения и смещения датчика), и этот факт используется только для обновления усредненной гистограммы каждые м -го импульса.Гистограммы м и не нужно запоминать, и каждое событие только увеличивает количество бинов. Новая функция оценки вычисляется из накопленной гистограммы путем ее нормализации только после м -го импульса.
Расчет карты оценок оптимизирован путем накопления оценок событий для – лазерных импульсов. Каждое событие требует поиска его очков и суммы на карте очков. После каждой суммы, если новое значение балла выше предыдущего максимального балла для этого столбца, то новое максимальное значение балла и его местоположение сохраняются для этого столбца. Это накопление увеличивает задержку в — раз, но необходимо в любом случае, когда события DVS не генерируются надежно каждым фронтом импульса.
После накопления – лазерных импульсов поиск максимальных по столбцам пикселей лазерных линий основан на максимальных значениях и их положениях, сохраненных во время накопления. Для каждого столбца вычисляется средневзвешенное положение пика, начиная с сохраненного значения пика и итеративно по пикселям вверх и вниз от местоположения пика до тех пор, пока оценка не упадет ниже порогового значения.Таким образом, для каждого столбца проверяется только несколько пикселей карты оценок.
Последний шаг — сбросить карту накопленных баллов и пиковые значения до нуля. Этот низкоуровневый сброс памяти выполняется микропроцессорным логическим оборудованием и выполняется очень быстро.
Результаты этих оптимизаций представлены в разделе «Результаты».
Настройки параметров
Поскольку DVS выполняет аналоговые вычисления на уровне пикселей, поведение датчика зависит от настроек смещения датчика. Эти настройки могут использоваться для управления такими параметрами, как частота отсечки временного контраста и пороговые уровни.Для экспериментов, описанных ниже, настройки смещения были оптимизированы, чтобы сообщать как о небольших, так и о быстрых изменениях. Эти настройки приводят к увеличению количества шумовых событий, что не влияет на производительность, поскольку они успешно отфильтровываются с помощью алгоритма, описанного ранее. Кроме того, смещения устанавливаются для получения четкого пика на временной гистограмме событий выключения (рисунок 6). Вариация формы пика для событий включения и выключения вызвана разными схемами обнаружения для двух полярностей в пикселе (Lichtsteiner et al., 2008) и различных условиях стартовой засветки перед фронтами импульсов.
Эти настройки могут использоваться для управления такими параметрами, как частота отсечки временного контраста и пороговые уровни.Для экспериментов, описанных ниже, настройки смещения были оптимизированы, чтобы сообщать как о небольших, так и о быстрых изменениях. Эти настройки приводят к увеличению количества шумовых событий, что не влияет на производительность, поскольку они успешно отфильтровываются с помощью алгоритма, описанного ранее. Кроме того, смещения устанавливаются для получения четкого пика на временной гистограмме событий выключения (рисунок 6). Вариация формы пика для событий включения и выключения вызвана разными схемами обнаружения для двух полярностей в пикселе (Lichtsteiner et al., 2008) и различных условиях стартовой засветки перед фронтами импульсов.
Параметры алгоритма выбираются эвристически: размер бина фиксирован на 50 мкс, среднее значение функции оценки берется по скользящему окну размером м = 1000 гистограмм, обнаружение полос установлено на среднее значение o = 3 вероятность карты, а пиковый порог для обнаружения линии выбран равным Θ пик = 1,5.
Во-первых, была измерена производительность алгоритма извлечения полос.Поскольку производительность системы ограничена мощностью используемого лазера, возможности DVS с использованием более сильного лазера были охарактеризованы, чтобы исследовать пределы подхода. Наконец, был использован сложный трехмерный ландшафт для оценки производительности в более реалистичных условиях.
Результаты
Результаты извлечения лазерных полос, представленные ниже, были запущены в режиме реального времени как jAER-фильтр с открытым исходным кодом FilterLaserLine (jAER, 2007) на Intel Core i7 975 @ 3.Платформа Windows 7 × 64 33 ГГц с использованием Java 1.7u45. Трехмерная реконструкция выполнялась автономно в Matlab на той же платформе.
Сравнение вычислительных затрат на обработку события (измеряемых во времени ЦП) между алгоритмом на основе кадров и алгоритмом на основе событий с o = 10 импульсами показало улучшение на 1800% с 900 до 50 нс на событие. Это улучшение является прямым результатом разреженного вывода датчика: для каждого обновления точки лазерной линии учитываются только несколько активных пикселей вокруг пикового значения в столбце карты оценок, а не весь столбец.При типичной частоте событий 500 keps, наблюдаемой в примере реконструкции местности, с использованием частоты лазерных импульсов 500 Гц, одно ядро этого (мощного) ПК занято 2,5% доступного процессорного времени с использованием алгоритма, основанного на событиях. Отключение обновления гистограммы функции оценки дополнительно сокращает время вычислений в среднем до 30 нс / событие, всего на 25 нс больше, чем обработка пакетов событий с помощью фильтра jAER «без операции», который выполняет итерацию по пакетам событий DVS без каких-либо дополнительных действий.
Это улучшение является прямым результатом разреженного вывода датчика: для каждого обновления точки лазерной линии учитываются только несколько активных пикселей вокруг пикового значения в столбце карты оценок, а не весь столбец.При типичной частоте событий 500 keps, наблюдаемой в примере реконструкции местности, с использованием частоты лазерных импульсов 500 Гц, одно ядро этого (мощного) ПК занято 2,5% доступного процессорного времени с использованием алгоритма, основанного на событиях. Отключение обновления гистограммы функции оценки дополнительно сокращает время вычислений в среднем до 30 нс / событие, всего на 25 нс больше, чем обработка пакетов событий с помощью фильтра jAER «без операции», который выполняет итерацию по пакетам событий DVS без каких-либо дополнительных действий.
Производительность экстракции
Чтобы оценить производительность алгоритма выделения полос по обнаружению линий, наземная истина была вручную установлена для сценария, в котором простой блок одинаковой высоты проходил под установкой. Блок перемещался со скоростью около 2 см / с, чтобы исследовать производительность алгоритма извлечения лазерной полосы на разных частотах. В таблице 1 отображаются результаты этих измерений: «Ложные срабатывания» обозначают отношение событий, ошибочно связанных с линией, к общему количеству событий.Производительность алгоритма падает на частоте 500 Гц, и поскольку DVS должен быть способен обнаруживать временные контрасты в режиме кГц, это было дополнительно исследовано. Для оптимальной работы алгоритма каждый импульс должен вызывать как минимум одно событие в столбце. Это не относится к линейному лазеру, работающему с частотой 500 Гц, потому что ширина полосы пикселей при используемой интенсивности лазера ограничена примерно этой частотой. Следовательно, не каждый импульс приводит к событию DVS, и поэтому лазерная полоса может быть обнаружена только в нескольких столбцах, что приводит к ухудшению качества реконструкции.
Блок перемещался со скоростью около 2 см / с, чтобы исследовать производительность алгоритма извлечения лазерной полосы на разных частотах. В таблице 1 отображаются результаты этих измерений: «Ложные срабатывания» обозначают отношение событий, ошибочно связанных с линией, к общему количеству событий.Производительность алгоритма падает на частоте 500 Гц, и поскольку DVS должен быть способен обнаруживать временные контрасты в режиме кГц, это было дополнительно исследовано. Для оптимальной работы алгоритма каждый импульс должен вызывать как минимум одно событие в столбце. Это не относится к линейному лазеру, работающему с частотой 500 Гц, потому что ширина полосы пикселей при используемой интенсивности лазера ограничена примерно этой частотой. Следовательно, не каждый импульс приводит к событию DVS, и поэтому лазерная полоса может быть обнаружена только в нескольких столбцах, что приводит к ухудшению качества реконструкции.
Таблица 1. Производительность алгоритма выделения строк .
Чтобы исследовать, насколько быстро может работать система, была использована другая лазерная установка: более сильный точечный лазер (4,75 мВт, класс C) был импульсным с использованием механического затвора, чтобы избежать артефактов от времени нарастания и спада электронного драйвера. Эта точка была записана с помощью DVS, чтобы выяснить, может ли он вызвать по крайней мере одно событие на полярность и импульс на высоких частотах. Измерения на Рисунке 7 показывают, что даже на частотах, превышающих 2 кГц, импульс инициирует достаточное количество событий.Механический затвор не позволял использовать лазер с частотой выше 2,1 кГц, поэтому DVS мог работать быстрее. Увеличение количества событий на импульс выше 1,8 кГц, вероятно, вызвано резонансами в схемах фоторецепторов DVS, которые способствуют генерации событий. Эти результаты показывают, что система, использующая достаточно мощный линейный лазер, должна работать на частоте до 2 кГц.
Рис. 7. Число событий в пикселе на лазерный импульс точечного лазера мощностью 4,75 мВт. Хотя количество событий уменьшается с более высокими частотами, среднее значение не опускается ниже 1 события за цикл даже при 2 кГц.
Реконструкция местности
В качестве доказательства концепции, а также для изучения возможных применений и недостатков подхода, с помощью программы CAD был спроектирован искусственный ландшафт, который был изготовлен на 3D-принтере (рис. 8). Сенсорная установка, показанная на Рисунке 2, использовалась вместе с салазками для сбора данных со скоростью 1,94 см / с над этой местностью с использованием частоты лазерных импульсов 200 Гц в направлении t y (уравнение 5 ).(Эта низкая скорость была ограничением двигателя постоянного тока, приводящего салазки.) На рисунке 9 показаны результаты этих измерений: на рисунке 9A показана модель CAD, а на рисунке 9B показаны необработанные извлеченные данные линии после преобразования с помощью уравнения 5 с использованием параметров калибровки и размеренная скорость салазок. Видны слепые зоны, где лазер не достигал поверхности, и более высокая плотность выборки на лицевых поверхностях. Эти слепые зоны были заполнены применением функции MATLAB © TriScatteredInterp к точкам выборки, как показано на рисунке 9C.Наконец, на рис. 9D показана ошибка между реконструкцией и моделью, как описано в следующем абзаце.
Видны слепые зоны, где лазер не достигал поверхности, и более высокая плотность выборки на лицевых поверхностях. Эти слепые зоны были заполнены применением функции MATLAB © TriScatteredInterp к точкам выборки, как показано на рисунке 9C.Наконец, на рис. 9D показана ошибка между реконструкцией и моделью, как описано в следующем абзаце.
Рис. 8. Искусственный трехмерный прототип местности, использованный для подтверждения концепции реконструкции . Синий: область, изображенная на Рисунке 9, Красный: лазерная линия, Черный: направление сканирования.
Рис. 9. Реконструированная поверхность. (A) CAD-модель поверхности. (B) Измеренные точки данных. (C) Интерполированная реконструкция поверхности с использованием функции Matlab TriScatteredInterp . (D) Расстояние между ближайшей точкой реконструкции и моделью, выровненной с помощью ICP (Besl and McKay, 1992). Этот участок реконструкции был выбран для отображения, потому что в окружающей области наблюдались граничные эффекты, вызванные гауссовым профилем лазерной линии, который снизил частоту событий DVS до слишком низкой, чтобы привести к приемлемой реконструкции.
Для количественной оценки ошибки данные сравнивались с истинными данными модели САПР. Однако в модели и данных отсутствуют метки выравнивания, поэтому сначала они были выровнены вручную с помощью глобального перевода.Затем выравнивание было уточнено с использованием итеративного алгоритма ближайшей точки (ICP; Besl and McKay, 1992), который слегка скорректировал глобальное перемещение и вращение, чтобы минимизировать суммарные абсолютные ошибки расстояния. В-третьих, ближайшая трехмерная точка модели была определена для каждой точки не интерполированных исходных данных на Рисунке 9B, и, в-четвертых, было измерено расстояние до этой точки модели. Результирующая точность, то есть среднее расстояние в 3D между этими двумя точками в данных 3D, составляет 1,7 ± 1,1 мм, т. Е.среднее абсолютное расстояние между образцом и точками данных составляет 1,7 мм, но ошибки варьируются со стандартным отклонением 1,1 мм. Эта точность соответствует точности измерения лазерной линии ± 0,25 пикселя с учетом геометрии измерительной установки. В передискретизированных линейно интерполированных данных, показанных на рисунке 9D, большая часть ошибки возникает из частей поверхности, где линейный лазер перекрывается поверхностью, которые интерполируются как плоские поверхности, и, в частности, нижняя часть впадин показывает худшая ошибка, как и следовало ожидать.
Доступен онлайн-фильм, показывающий извлечение полос для реконструкции местности с использованием более высокой частоты лазерных импульсов 500 Гц (Адаптивная фильтрация импульсной лазерной линии DVS для реконструкции поверхности местности, 2013). В этом видео также показаны различные этапы вывода сенсора и выделения лазерной линии.
Эта запись выполняется при скорости салазок около 1 м / с с использованием свободно падающих салазок на уклоне, которое не ограничивается скоростью двигателя постоянного тока. В этом фильме также ясно, что некоторые участки местности, где лазер попадает на поверхность под углом взгляда, не генерируют линейные данные.В фильме также показано, что фоновая активность DVS, вызванная контрастом изображения, также эффективно отфильтровывается алгоритмом, хотя на этой высокой частоте многие пиксели не генерируют события для каждого лазерного импульса.
Обсуждение
В этой статье было продемонстрировано первое применение DVS в качестве сенсорного устройства для реконструкции местности. Был предложен алгоритм адаптивной фильтрации на основе событий для эффективного выделения положения лазерной линии. Предлагаемое применение DVS в установках активных датчиков, таких как 3D-сканеры, позволяет реконструировать местность с высоким временным разрешением без необходимости использования энергоемкой высокоскоростной камеры и последующей обработки с высокой частотой кадров или каких-либо движущихся частей.Основанный на событиях вывод DVS может снизить вычислительную нагрузку и тем самым уменьшить задержку и энергопотребление таких систем. Система извлекает выгоду из высокого динамического диапазона и разреженного выходного сигнала сенсора, а также высокой разрешающей способности информации о динамике сцены. С помощью предложенного алгоритма можно извлекать временные корреляции между импульсным стимулом и записанным сигналом, а также использовать их в качестве критерия фильтрации для извлечения полос.
Система извлекает выгоду из высокого динамического диапазона и разреженного выходного сигнала сенсора, а также высокой разрешающей способности информации о динамике сцены. С помощью предложенного алгоритма можно извлекать временные корреляции между импульсным стимулом и записанным сигналом, а также использовать их в качестве критерия фильтрации для извлечения полос.
Дальнейшие улучшения системы необходимы для реализации целевой интеграции с мобильными роботами. Накладные расходы Java и jAER должны быть удалены, а алгоритм должен быть реализован на языке программирования более низкого уровня (например, C) с использованием оптимизированного алгоритма, основанного на событиях. Модель движения камеры и реконструкция поверхности должны быть интегрированы в программное обеспечение, а для переносимости системы ее необходимо будет встроить в камеру, такую как eDVS (Conradt et al., 2009). Модели движения могут быть получены с помощью алгоритмов трехмерного поверхностного SLAM (Newcombe et al.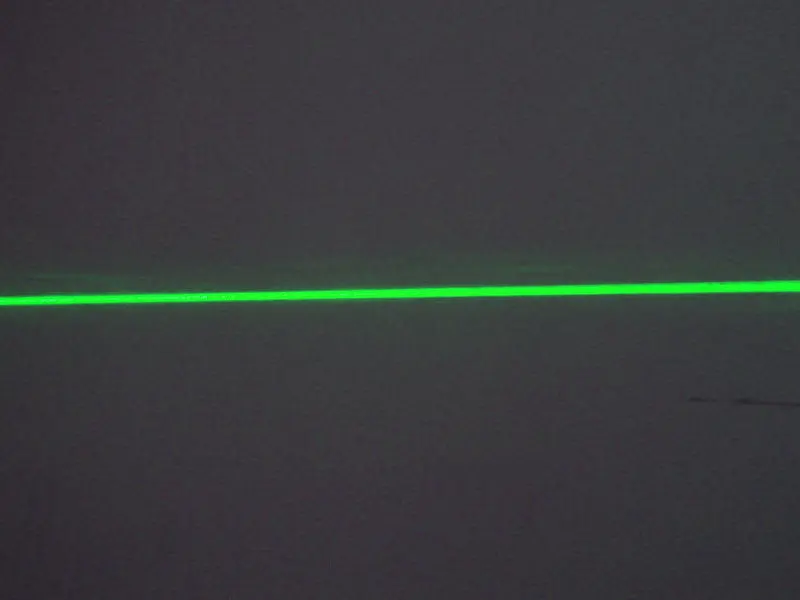 , 2011) и / или инерциальных единиц измерения (IMU). Использование DVS с более высокой чувствительностью (Serrano-Gotarredona, Linares-Barranco, 2013) позволило бы использовать более слабые лазеры для экономии энергии. Датчики с более высоким разрешением, которые включают статическое считывание (Posch et al., 2011; Berner et al., 2013), облегчили бы калибровку и увеличили бы разрешение. Использование более яркого линейного лазера позволит увеличить частоту импульсов лазера, расширить диапазон чувствительности, а также использовать его на открытом воздухе.
, 2011) и / или инерциальных единиц измерения (IMU). Использование DVS с более высокой чувствительностью (Serrano-Gotarredona, Linares-Barranco, 2013) позволило бы использовать более слабые лазеры для экономии энергии. Датчики с более высоким разрешением, которые включают статическое считывание (Posch et al., 2011; Berner et al., 2013), облегчили бы калибровку и увеличили бы разрешение. Использование более яркого линейного лазера позволит увеличить частоту импульсов лазера, расширить диапазон чувствительности, а также использовать его на открытом воздухе.
Но, несмотря на незрелость, предлагаемый подход хорошо сравнивается с существующими коммерческими системами измерения глубины, такими как Microsoft Kinect © и лидаром, оптимизированным для мобильных роботов, таких как SOKUIKI (сравнение показано в таблице 2). Система имеет более высокую максимальную частоту дискретизации, чем другие датчики, гораздо более низкую среднюю задержку 5 мс при частоте следования импульсов 200 Гц и более точную на малых расстояниях.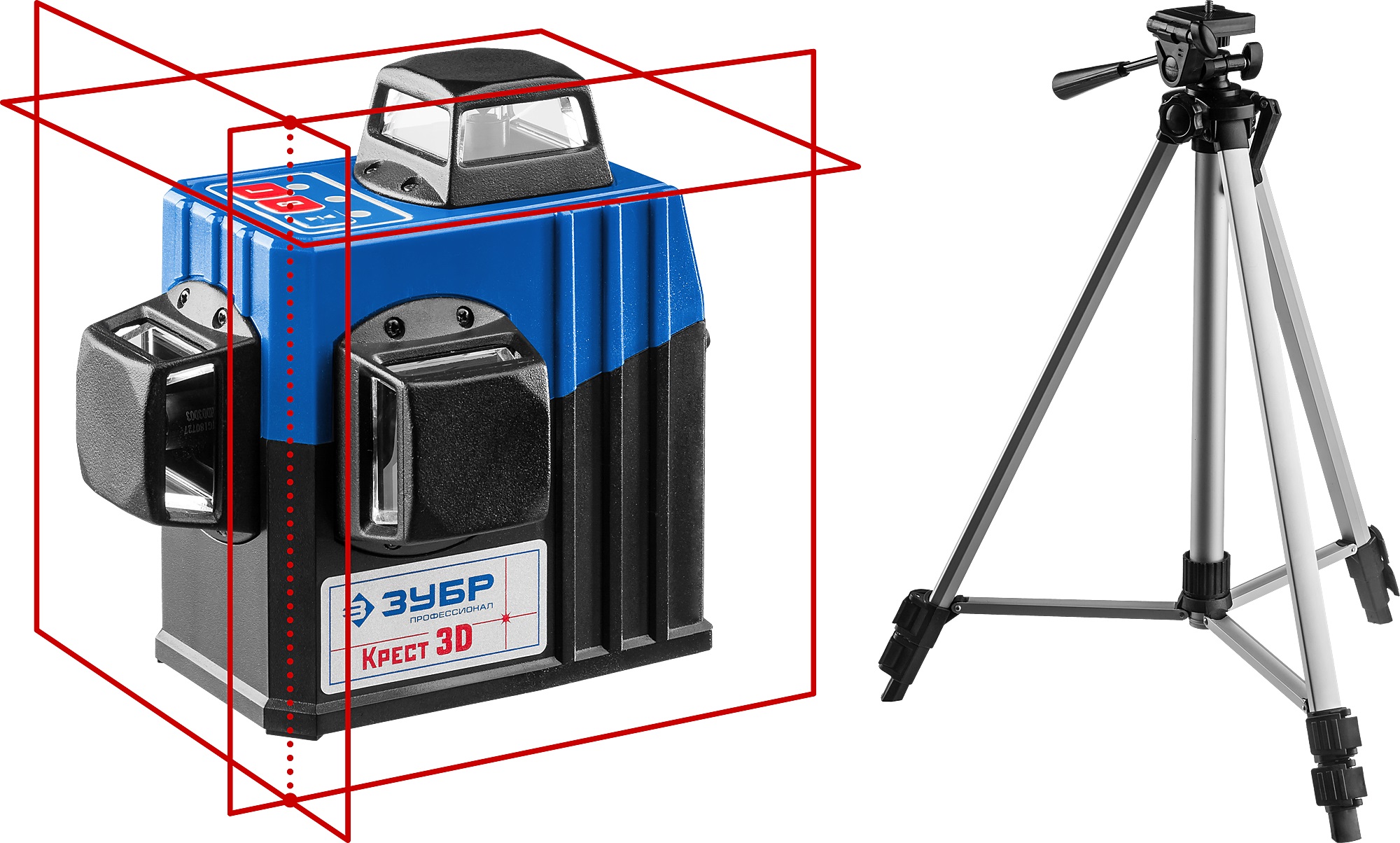 Эти функции имеют решающее значение для планирования движения и предотвращения препятствий в быстро движущихся роботах.Однако задержка предлагаемого подхода зависит от надежности ответов пикселей DVS, поэтому существует компромисс между задержкой и шумом, который еще не полностью изучен, и этот компромисс также будет зависеть от других условий, таких как фоновое освещение. и отражательная способность поверхности. С другой стороны, пространственное разрешение системы ограничено использованием камеры DVS128 первого поколения, а поле зрения предлагаемой системы узкое. Но эти недостатки не являются принципиальными и их легко исправить (например,g., используя более новые датчики, более короткие линзы и более сильные лазеры). Ограничение, заключающееся в том, что система не предоставляет карты глубины, но профили поверхности, можно преодолеть, проецируя разреженные двумерные световые узоры вместо лазерной линии. Потребляемая мощность в 500 мВт для USB-камеры и лазера не включает мощность для обработки событий или восстановления поверхности, но, поскольку энергопотребление сенсорной системы сравнительно ниже, обработка данных, вероятно, будет соответствовать бюджету мощности другого два подхода при встраивании в 32-битный микроконтроллер на базе ARM, e. g., как в Conradt et al. (2009). Таким образом, эта статья демонстрирует применимость DVS в сочетании с импульсными линейными лазерами для обеспечения измерения профиля поверхности с малой задержкой и низкими вычислительными затратами, но интеграция на мобильные платформы потребует дополнительной работы.
Эти функции имеют решающее значение для планирования движения и предотвращения препятствий в быстро движущихся роботах.Однако задержка предлагаемого подхода зависит от надежности ответов пикселей DVS, поэтому существует компромисс между задержкой и шумом, который еще не полностью изучен, и этот компромисс также будет зависеть от других условий, таких как фоновое освещение. и отражательная способность поверхности. С другой стороны, пространственное разрешение системы ограничено использованием камеры DVS128 первого поколения, а поле зрения предлагаемой системы узкое. Но эти недостатки не являются принципиальными и их легко исправить (например,g., используя более новые датчики, более короткие линзы и более сильные лазеры). Ограничение, заключающееся в том, что система не предоставляет карты глубины, но профили поверхности, можно преодолеть, проецируя разреженные двумерные световые узоры вместо лазерной линии. Потребляемая мощность в 500 мВт для USB-камеры и лазера не включает мощность для обработки событий или восстановления поверхности, но, поскольку энергопотребление сенсорной системы сравнительно ниже, обработка данных, вероятно, будет соответствовать бюджету мощности другого два подхода при встраивании в 32-битный микроконтроллер на базе ARM, e. g., как в Conradt et al. (2009). Таким образом, эта статья демонстрирует применимость DVS в сочетании с импульсными линейными лазерами для обеспечения измерения профиля поверхности с малой задержкой и низкими вычислительными затратами, но интеграция на мобильные платформы потребует дополнительной работы.
Таблица 2. Сравнение производительности предлагаемого подхода с существующими датчиками глубины .
Заявление о конфликте интересов
Один из авторов (Тоби Дельбрук) — один из редакторов темы исследования.Один из авторов (Тоби Дельбрук) имеет финансовое участие в iniLabs, стартапе, который занимается коммерческим распространением прототипов камер DVS. Авторы заявляют, что исследование проводилось при отсутствии каких-либо коммерческих или финансовых отношений, которые могут быть истолкованы как потенциальный конфликт интересов.
Благодарности
Это исследование было поддержано проектом SeeBetter (FP7-ICT-2009-6), финансируемым Европейским союзом, Швейцарским национальным научным фондом через NCCR Robotics, ETH Zurich и Цюрихским университетом. Авторы благодарят рецензентов за их полезную критику, которая оказала большое влияние на окончательную форму этой статьи.
Авторы благодарят рецензентов за их полезную критику, которая оказала большое влияние на окончательную форму этой статьи.
Дополнительные материалы
Дополнительные материалы к этой статье можно найти в Интернете по адресу: http://www.frontiersin.org/journal/10.3389/fnins.2013.00275/abstract
Список литературы
Адаптивная фильтрация отклика импульсной лазерной линии DVS для реконструкции поверхности местности. (2013). Доступно в Интернете по адресу: http://youtu.be/20OGD5Wwe9Q. (Дата обращения: 23 декабря 2013 г.).
Андерсен, М. Р., Йенсен, Т., Лисовский, П., Мортенсен, А. К., Хансен, М. К., Грегерсен, Т., и др. (2012). Оценка датчика глубины Kinect для приложений компьютерного зрения . Орхус: Орхусский университет, инженерный факультет. Доступно в Интернете по адресу: http://eng.au.dk/fileadmin/DJF/ENG/PDF-filer/Tekniske_rapporter/Technical_Report_ECE-TR-6-samlet.pdf. (Дата обращения: 11 декабря 2013 г.).
Бернер Р., Брандли К.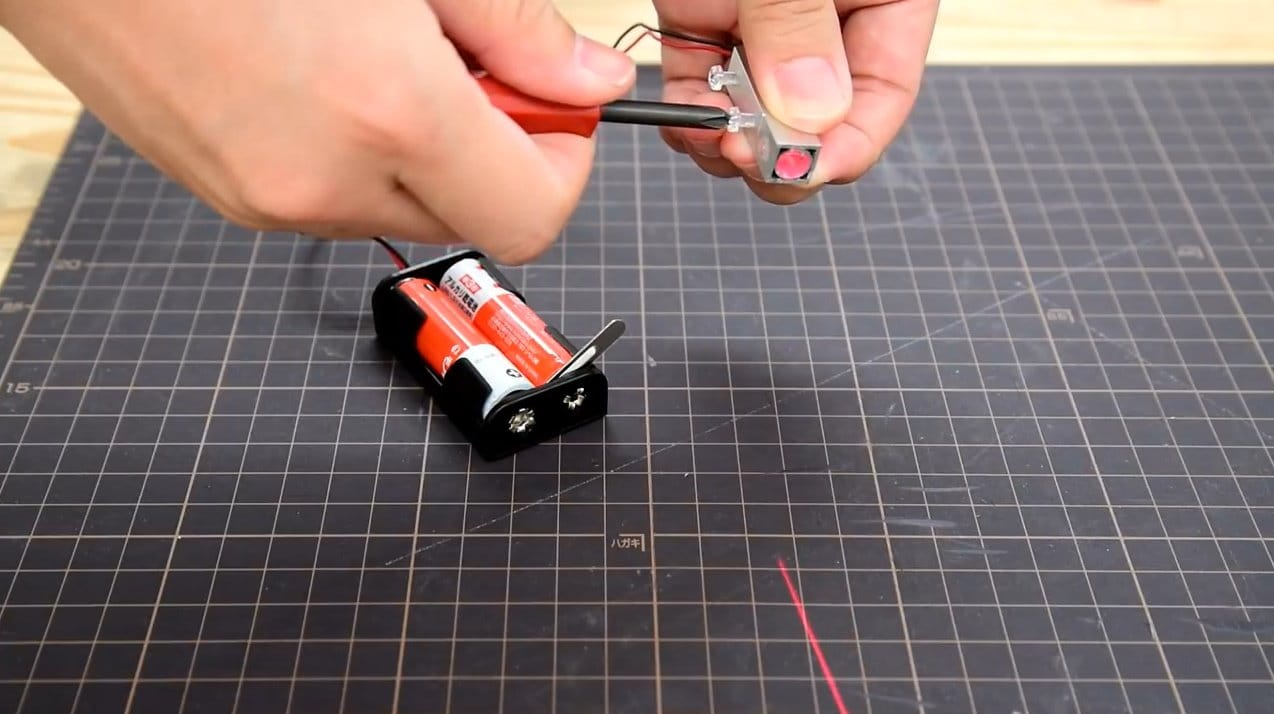 , Янг М., Лю С.-К. и Дельбрук Т. (2013).«Видеодатчик с разреженным выходом 240 × 180 10 мВт, 12 мкс для мобильных приложений», на симпозиуме Симпозиум по схемам СБИС (Киото), C186 – C187.
, Янг М., Лю С.-К. и Дельбрук Т. (2013).«Видеодатчик с разреженным выходом 240 × 180 10 мВт, 12 мкс для мобильных приложений», на симпозиуме Симпозиум по схемам СБИС (Киото), C186 – C187.
Бесл, П. Дж., И Маккей, Н. Д. (1992). Метод регистрации трехмерных фигур. IEEE Trans. Pattern Anal. Мах. Intell . 14, 239–256. DOI: 10.1109 / 34.121791
CrossRef Полный текст
Конрад, Дж., Кук, М., Бернер, Р., Лихтштайнер, П., Дуглас, Р., и Дельбрук, Т. (2009). «Робот для балансировки карандашей, использующий пару датчиков динамического зрения AER», в Международный симпозиум IEEE по схемам и системам (ISCAS) 2009 г. (Тайбэй), 781–784.Доступно в Интернете по адресу: http://ieeexplore.ieee.org/lpdocs/epic03/wrapper.htm?arnumber=5117867. (Проверено 13 августа 2013 г.). DOI: 10.1109 / ISCAS.2009.5117867
CrossRef Полный текст
jAER. (2007). Проект с открытым исходным кодом JAER. Доступно в Интернете по адресу: http://jaerproject. net. (Дата обращения: 17 сентября 2013 г.).
net. (Дата обращения: 17 сентября 2013 г.).
Lichtsteiner, P., Posch, C., and Delbruck, T. (2008). Асинхронный датчик временного контраста 128 × 128 120 дБ с задержкой 15 мкс. IEEE J. Твердотельные схемы 43, 566–576.DOI: 10.1109 / JSSC.2007.
7CrossRef Полный текст
Ливингстон, М. А., Себастьян, Дж., Ай, З., и Деккер, Дж. У. (2012). «Измерения производительности каркаса Microsoft Kinect», в 2012 IEEE Virtual Reality Short Papers and Posters (VRW) (Costa Mesa, CA), 119–120. DOI: 10.1109 / VR.2012.6180911
CrossRef Полный текст
Ньюкомб Р. А., Дэвисон А. Дж., Изади С., Коли П., Хиллигс О., Шоттон Дж. И др. (2011). «KinectFusion: картографирование и отслеживание плотной поверхности в реальном времени», , 2011, 10-й Международный симпозиум IEEE по смешанной и дополненной реальности (ISMAR), (Базель), 127–136.
Ni, Z., Pacoret, C., Benosman, R., Ieng, S.-H., and Régnier, S. (2012). Асинхронное высокоскоростное зрение на основе событий для отслеживания микрочастиц. J. Microsc . 245, 236–244. DOI: 10.1111 / j.1365-2818.2011.03565.x
J. Microsc . 245, 236–244. DOI: 10.1111 / j.1365-2818.2011.03565.x
CrossRef Полный текст
Оргидан Р., Салви Дж. И Муаддиб Э. М. (2006). Моделирование и оценка точности нового всенаправленного датчика вычисления глубины. Распознавание образов. Lett . 27, 843–853. DOI: 10.1016 / j.patrec.2005.12.015
CrossRef Полный текст
Паланиаппа, Р., Мировски, П., Хо, Т. К., Стек, Х., Уайтинг, П., и Макдональд, М. (2011). Автономный RF-геодезический робот для определения местоположения и отслеживания в помещении . Gumaraes. Доступно в Интернете по адресу: http://ipin2011.dsi.uminho.pt/PDFs/Shortpaper/49_Short_Paper.pdf
Пош, К., Матолин, Д., и Вольгенанн, Р. (2011). ШИМ-датчик изображения QVGA с динамическим диапазоном 143 дБ, без кадров, со сжатием видео на уровне пикселей без потерь и CDS во временной области. IEEE J. Твердотельные схемы 46, 259–275. DOI: 10.1109 / JSSC.2010.2085952
CrossRef Полный текст
Робинсон А. , Олбул Л. и Родригес М. (2003). «Методы индексации полос в системах сканирования с некодированным структурированным светом», Международная конференция в Центральной Европе по компьютерной графике, визуализации и компьютерному зрению (Пльзень; Бори). Доступно в Интернете по адресу: http://wscg.zcu.cz/WSCG2004/Papers_2004_Full/I11.pdf
Серрано-Готарредона, Т., и Линарес-Барранко, Б. (2013). Контрастная чувствительность 128 × 128 1,5% 0,9% FPN Задержка 3 мкс 4 мВт асинхронный бескадровый датчик динамического зрения с трансимпедансными предусилителями. IEEE J. Твердотельные схемы 48, 827–838. DOI: 10.1109 / JSSC.2012.2230553
CrossRef Полный текст
Зигварт Р. (2011). Введение в автономных мобильных роботов . 2-е изд. Кембридж, Массачусетс: MIT Press.
Усаментиага Р., Молледа Дж. И Гарсия Д. Ф. (2010).Быстрое и надежное извлечение лазерных полос для 3D-реконструкции в промышленных условиях. Мах. Vis. Заявление . 23, 179–196. DOI: 10.1007 / s00138-010-0288-6
DOI: 10.1007 / s00138-010-0288-6
CrossRef Полный текст
Виагер, М. (2011). Анализ Kinect для мобильных роботов . Люнгби: Технический университет Дании.
Вайс, С., Ахтелик, М., Кнайп, Л., Скарамуцца, Д., и Сигварт, Р. (2010). Интуитивно понятные 3D-карты для исследования местности MAV и обхода препятствий. J. Intell.Робот. Syst . 61, 473–493. DOI: 10.1007 / s10846-010-9491-y
CrossRef Полный текст
Ёситака, Х., Хирохико, К., Акихиса, О., и Шиничи, Ю. (2006). «Локализация мобильного робота и картографирование путем согласования сканирования с использованием интенсивности лазерного отражения датчика SOKUIKI», IECON 2006 — 32-я ежегодная конференция по промышленной электронике IEEE (Париж), 3018–3023.
19 лучших устройств на 2021 год
Stocksy
Забавный факт обо мне: лазерная эпиляция дома стала моей любимой вещью за последний год.Хотя волосы на теле абсолютно нормальны — и решите ли вы избавиться от них или оставить их на 100 процентов до вы — я лично попадаю в лагерь людей, которые хотят чертовски шелковистой кожи. Итак, изучив все бритвы, наборы для восковой эпиляции и триммеры, представленные на рынке, я наконец пришел к выводу, что есть очевидный победитель v в игре по эпиляции: лазеров . Нет, я не говорю о тех дорогостоящих процедурах, которые вы можете пройти в офисе дермы, — я имею в виду те маленькие домашние устройства для лазерной эпиляции , которые легко удаляют ваши волосы .
Итак, изучив все бритвы, наборы для восковой эпиляции и триммеры, представленные на рынке, я наконец пришел к выводу, что есть очевидный победитель v в игре по эпиляции: лазеров . Нет, я не говорю о тех дорогостоящих процедурах, которые вы можете пройти в офисе дермы, — я имею в виду те маленькие домашние устройства для лазерной эпиляции , которые легко удаляют ваши волосы .
Доверие: если ваша цель — долгосрочное удаление волос, вам необходимо иметь одно из этих устройств в вашей команде. Вот почему я поговорил с дерматологом Арашем Ахаваном, доктором медицины, чтобы узнать все, что вам нужно знать, прежде чем попробовать лазерную эпиляцию в домашних условиях. Плюс 13 лучших устройств, которые действительно работают.
Что такое лазерная эпиляция?
Во-первых, напоминание: лазерная эпиляция — это процесс, при котором свет (также известный как лазерные лучи) направляется на вашу кожу небольшими импульсами, нацеливается и нагревает волосяной фолликул, чтобы разрушить его часть при каждой обработке. ДокторАхаван. По сравнению с процедурами в офисе (которые, хотя и являются дорогостоящими, выполняются сертифицированными специалистами или обученными профессионалами, которые точно знают, что , что они делают), домашние устройства имеют гораздо более низкий выход энергии, что делает их более безопасными для использования. вы можете использовать по своему усмотрению.
ДокторАхаван. По сравнению с процедурами в офисе (которые, хотя и являются дорогостоящими, выполняются сертифицированными специалистами или обученными профессионалами, которые точно знают, что , что они делают), домашние устройства имеют гораздо более низкий выход энергии, что делает их более безопасными для использования. вы можете использовать по своему усмотрению.
Безопасна ли лазерная эпиляция в домашних условиях?
«Домашние устройства, как правило, безопасны, хотя существует реальная возможность побочных эффектов, таких как рубцы», — говорит д-р Ахаван, который настоятельно рекомендует использовать служебный маршрут, если у вас есть средства (хотя он может стоить от 200 до 1500 долларов).«Если вы используете домашнее устройство, не используйте его на чувствительных участках, таких как лицо и шея, — и начните с патч-тестирования на меньшей площади, а затем подождите три-четыре недели, чтобы убедиться, что без осложнений ».
И сначала прочтите инструкции.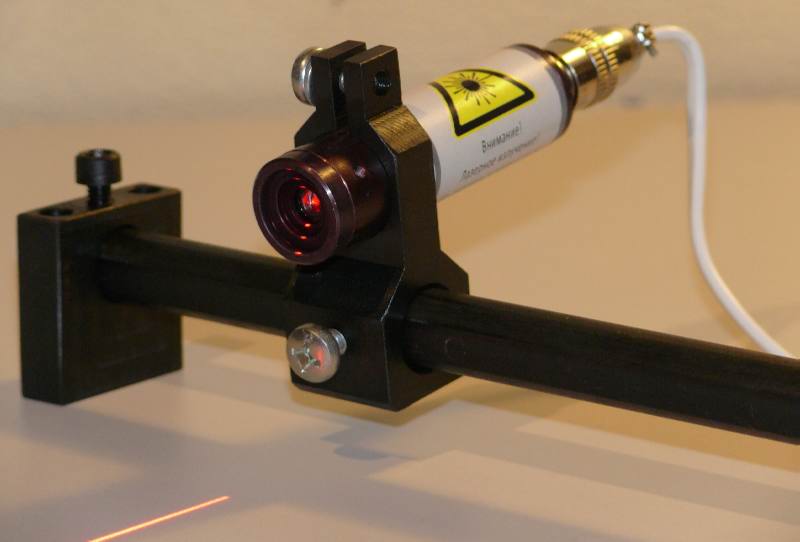 Важно знать, что некоторые устройства подходят не для всех оттенков кожи, потому, что не все лазеры могут правильно различать темные волосяные фолликулы и темную кожу и потенциально могут вызвать ожоги. Хорошее практическое правило? Поговорите со своим дерматологом, прежде чем пробовать какие-либо домашние лазерные устройства, на всякий случай — в конце концов, это ваша кожа.
Важно знать, что некоторые устройства подходят не для всех оттенков кожи, потому, что не все лазеры могут правильно различать темные волосяные фолликулы и темную кожу и потенциально могут вызвать ожоги. Хорошее практическое правило? Поговорите со своим дерматологом, прежде чем пробовать какие-либо домашние лазерные устройства, на всякий случай — в конце концов, это ваша кожа.
Можно ли лазером волос на лобке в домашних условиях?
Даже если ваше устройство для лазерной эпиляции утверждает, что оно безопасно для всех областей, вам нужно действовать осторожно при лазерной обработке лобковых волос. Линия бикини в целом в порядке (опять же, патч-тест, чтобы убедиться, что нет отрицательных побочных эффектов), но в любом другом месте внизу нет. Если вы хотите получить тот же эффект, что и настоящий бразилец, вам нужно, чтобы лазерная эпиляция была сделана опытным профессионалом.
Как пользоваться аппаратом для лазерной эпиляции дома?
Помните: вам нужно начать лечение с внимательного чтения инструкций. Каждое устройство будет отличаться от других, но не забывайте об этих советах:
- Начните с бритья кожи новой бритвой. Вы хотите, чтобы эта область была чистой, сухой, без лосьонов или кремов. Это поможет убедиться, что ваше устройство легко и напрямую достигает фолликулов.
- Пластырь — проверьте свою кожу перед обработкой больших участков. Начать с небольшого участка кожи и подождать три-четыре недели — самый безопасный способ убедиться, что у вас не будет плохой реакции.
- Начните с минимальной мощности и постепенно увеличивайте ее. Чтобы по-настоящему научиться работать с устройством, требуется несколько сеансов, поэтому начинайте медленно и медленно, чтобы избежать ошибок и / или раздражения.
- Наберитесь терпения. Лазерная эпиляция не работает в одночасье — требуется несколько сеансов в течение многих недель, чтобы добиться максимального уменьшения волос. Терпение — ключ ко всему.
 Терпение — ключ ко всему.
Терпение — ключ ко всему. Хорошо, теперь то, для чего вы действительно пришли сюда. Продолжайте читать, чтобы узнать о 19 лучших устройствах для лазерной эпиляции в домашних условиях, которые вы можете купить прямо сейчас.
Реклама — продолжить чтение ниже
Это любимое устройство для лазерной эпиляции в домашних условиях Amazon
Xsoul Домашняя IPL-эпиляцияПокупатели Amazon ничего не могут сказать об этом доступном (и эффективном) устройстве для лазерной эпиляции. Он использует технологию IPL для , навсегда удаляя волоски, и подходит для использования на вашем лице, руках, ногах, животе и т. Д. .Просто к сведению, перед покупкой ознакомьтесь с таблицей цветов кожи и волос продукта, чтобы убедиться, что ваш оттенок кожи будет работать с лазером.
Лучшее устройство для антивозрастной лазерной эпиляции в домашних условиях
Джовс Венера Про Это устройство для лазерной эпиляции не только содержит множество режимов и лечебных головок, позволяющих легко удалять волосы в домашних условиях, но и обладает антивозрастными свойствами. Просто наденьте насадку для омоложения кожи, чтобы повысить выработку коллагена и эластина n , и, в свою очередь, разгладить тонкие линии и морщины, а также улучшить общую текстуру кожи.
Просто наденьте насадку для омоложения кожи, чтобы повысить выработку коллагена и эластина n , и, в свою очередь, разгладить тонкие линии и морщины, а также улучшить общую текстуру кожи.
Лучшее устройство для лазерной эпиляции ног в домашних условиях
Система удаления волос Conair Lumilisse IPLЭто устройство для лазерной эпиляции в домашних условиях идеально подходит для удаления волос на ногах благодаря постоянной настройке непрерывного режима. Он позволяет легко скользить устройством по большим участкам кожи за один проход. , поэтому вам не нужно постоянно останавливаться и запускаться — гениально.
Лучшее безболезненное устройство для домашней лазерной эпиляции
Перманентное удаление волос BoSidin Лазерная эпиляция может быть неудобной, но, честно говоря, этот вариант безболезнен.Он предварительно охлаждает кожу прямо перед удалением волос, делает его хорошим вариантом для тех, кто плохо переносит боль (привет, это я) или чувствительную, склонную к покраснению кожу.
Лучшее мобильное устройство для лазерной эпиляции
Sensica Sensilight Mini Bronze 300kДа, это миниатюрное устройство для лазерной эпиляции в домашних условиях одобрено Управлением по санитарному надзору за качеством пищевых продуктов и медикаментов, чтобы навсегда уменьшить рост волос, но его размер также идеален для хранения в дорожной сумке для макияжа и использования с собой.Если вы привержены своей косметической рутине, даже когда находитесь в отпуске, это вариант для вас.
Это супер-симпатичное устройство для лазерной эпиляции
Трубка для лазерной эпиляции IPL Rose Skin Co Прошу прощения, но разве это не самое красивое устройство для лазерной эпиляции в домашних условиях, которое вы когда-либо видели ?! Мне нравится цвет розового золота и шикарный дизайн, и, конечно же, тот факт, что гарантированно уменьшит рост волос с первого использования и прослужит до 10 лет.
Лучшее устройство для лазерной эпиляции грубых волос
Лазерная эпиляция MismonЕсли вы хотите избавиться от густых жестких волос на ногах, вам понравится это устройство для лазерной эпиляции в домашних условиях. Он по разумной цене, имеет восторженные отзывы на Amazon и помогает навсегда удалить ваши волосы после девяти процедур .
Лучшая лазерная эпиляция в домашних условиях для всех оттенков кожи
Перманентное удаление волос Silk’n Infinity в домашних условиях К сведению: большинство устройств для лазерной эпиляции в домашних условиях на самом деле не используют лазеры — вместо этого они используют интенсивный импульсный свет (IPL), который, как и лазеры, разрушает ваши волосяные фолликулы с помощью тепла.Это IPL-устройство известно своим портативным размером, настраиваемыми параметрами энергопотребления, и , его способностью с успешно удалять волосы на всех оттенках кожи . Совет от профессионала: для достижения наилучших результатов используйте только что выбритую, а не восковую! Кожу.
Совет от профессионала: для достижения наилучших результатов используйте только что выбритую, а не восковую! Кожу.
Лучший портативный лазер для удаления волос в домашних условиях
Трубка для удаления волос Kenzzi IPLНе дайте себя обмануть меньшим размером портативного устройства — это устройство для домашнего использования предназначено для удаления волос на ваших ногах, руках и даже на линии бикини.Он поставляется с пятью настройками мощности , так что вы можете настраивать свои процедуры (я бы рекомендовал начинать с самых низких настроек и постепенно повышать их), и результаты начинают проявляться через три-четыре недели.
Лучшая точная лазерная эпиляция в домашних условиях
Средство для удаления перманентных волос Iluminage Precise Touch Это небольшое устройство для удаления волос в домашних условиях идеально подходит для обработки более плотных и точных участков, и его даже достаточно нежно, чтобы использовать на вашем лице. (хотя, как всегда, если у вас очень чувствительная кожа — проверьте дермы, прежде чем что-либо пробовать).Комбинация IPL и радиочастоты означает, что этот BB составляет эффективных , и он одобрен FDA для всех оттенков кожи.
Лучшая лазерная эпиляция в домашних условиях для всех цветов волос
Система перманентного уменьшения волос Ora Iluminage TouchЭто определенно дороже, но это устройство , одобренное FDA, работает с широким спектром цветов волос (подумайте: белый, серый, светлый, красный, коричневый и черный) — то, что вы не найдете у большинства домашних лазеров.Просто знайте, что нужно время для работы . Большинство людей видят заметное уменьшение волос после семи недель непрерывного использования.
Лучшая быстрая лазерная эпиляция в домашних условиях
Аппарат для экспресс-эпиляции Silk’n Flash & Go Самое крутое в этом КПК то, что он работает быстро . Каждый сеанс занимает около 20 минут максимум (это примерно половина времени, необходимого для большинства домашних лазеров, FWIW), и вам нужно будет обрабатывать область только один раз в две недели в течение первых четырех-пяти сеансов (после этого , вы можете сократить до одного раза в месяц или по мере необходимости).
Каждый сеанс занимает около 20 минут максимум (это примерно половина времени, необходимого для большинства домашних лазеров, FWIW), и вам нужно будет обрабатывать область только один раз в две недели в течение первых четырех-пяти сеансов (после этого , вы можете сократить до одного раза в месяц или по мере необходимости).
Лучшая комфортная лазерная эпиляция в домашних условиях
Система перманентного удаления волос DeessСамое лучшее в этом устройстве для домашней эпиляции — это то, что оно действительно удобно. Это благодаря технологии охлаждения системы, которая работает с против , чтобы уменьшить любое тепло или возгорание, которые вы можете почувствовать от IPL . Начните с одной процедуры в неделю в течение шести недель, и вы увидите заметное сокращение волос на теле.
Лучшая лазерная эпиляция в домашних условиях для быстрого лечения
Система удаления волос Mē Sleek Face + Body Я понимаю: не все хотят сидеть и не торопиться с устройством для лазерной эпиляции. Вот что делает этот выбор таким замечательным — разработан для быстрого и безболезненного лечения. (подумайте: две минуты для рук, восемь минут для ног), и, что самое главное, он безопасен для всех оттенков кожи и цветов волос.Это то, что я называю беспроигрышным вариантом.
Вот что делает этот выбор таким замечательным — разработан для быстрого и безболезненного лечения. (подумайте: две минуты для рук, восемь минут для ног), и, что самое главное, он безопасен для всех оттенков кожи и цветов волос.Это то, что я называю беспроигрышным вариантом.
Лучшее долговечное устройство для лазерной эпиляции в домашних условиях
Средство для удаления волос IPL последнего поколения Braun Silk Expert Pro 5Это устройство для лазерной эпиляции в домашних условиях оснащено 300 000 вспышек света (что эквивалентно 22 годам лечения всего тела, поэтому вам не нужно беспокоиться о том, что он умрет на вас). Имея 10 уровней энергии, он также супер настраиваемый.
Лучшее доступное устройство для лазерной эпиляции в домашних условиях
Amzgirl IPL эпиляция Не хотите тратить кучу долларов на домашнее устройство для лазерной эпиляции? Нет проблем, потому что этот милый маленький выбор стоит 129 долларов и действительно эффективен. Имейте в виду, что он меньше, чем его более дорогие аналоги, поэтому лучше всего подходит для лечения концентрированных участков (например, подмышек или верхней губы).
Имейте в виду, что он меньше, чем его более дорогие аналоги, поэтому лучше всего подходит для лечения концентрированных участков (например, подмышек или верхней губы).
Лучшая лазерная эпиляция в домашних условиях для начинающих
Лазерная эпиляция Tria Beauty 4XЕсть причина, по которой дермы одержимы этим устройством для лазерной эпиляции в домашних условиях: оно сверхмощное, одобренное FDA и чрезвычайно простое в использовании ( благодаря светодиодному дисплею , который поможет вам настроить лечение и энергопотребление ). Кстати: когда вы включаете этого ребенка, он сканирует вашу кожу и не разблокируется, если ваш тон кожи и цвет волос не подходят для безопасного совпадения.
Лучшее настраиваемое устройство для лазерной эпиляции в домашних условиях
Устройство для удаления волос SmoothSkin Pure IPL Аппарат для удаления волос SmoothSkin Pure настоятельно рекомендуется сотнями довольных и довольных клиентов. Мало того, если вы новичок в устройствах для удаления волос, вы можете расслабиться, зная, что , этот, одобрен FDA и выполнит свою работу (безболезненно), учитывая, что это самое мощное устройство для удаления волос около .Мало того, устройство имеет три режима обработки, 10 настроек для управления интенсивностью и датчик кожи.
Мало того, если вы новичок в устройствах для удаления волос, вы можете расслабиться, зная, что , этот, одобрен FDA и выполнит свою работу (безболезненно), учитывая, что это самое мощное устройство для удаления волос около .Мало того, устройство имеет три режима обработки, 10 настроек для управления интенсивностью и датчик кожи.
Лучшая лазерная эпиляция для небольших участков в домашних условиях
Лазер для прецизионной эпиляции Tria Beauty для женщин и мужчинЭто устройство для лазерной эпиляции в домашних условиях практически такое же гладкое, как и получается — длинная очерченная форма позволяет легко воздействовать на труднодоступные и небольшие участки, такие как линия бикини, подмышки и верхняя губа .Просто знайте, что это устройство не предназначено для более темных тонов кожи — для получения безопасных результатов вам потребуется кожа от светлой до средней, а также коричневые или черные волосы.
Лорен Бальзамо Заместитель директора по красоте Лорен Бальзамо, заместитель директора по красоте Cosmopolitan, занимается вопросами кожи, волос, макияжа и ногтей как для журнала, так и для веб-сайта.